
Scientia Silvae Sinicae ›› 2026, Vol. 62 ›› Issue (1): 177-187.doi: 10.11707/j.1001-7488.LYKX20240770
• Research papers • Previous Articles Next Articles
Hongli Chen1,Guankai Wang1,WenFu Zhang2,Jian Zhang2,Hongliang Huang3,Zhenhua Yang4,Yin Zhao1,Xiaoqiang Du1,5,*( )
)
Received:2024-12-17
Revised:2025-06-25
Online:2026-01-25
Published:2026-01-14
Contact:
Xiaoqiang Du
E-mail:xqiangdu@zstu.edu.cn
CLC Number:
Hongli Chen,Guankai Wang,WenFu Zhang,Jian Zhang,Hongliang Huang,Zhenhua Yang,Yin Zhao,Xiaoqiang Du. Design and Testing of a Based on UAV Lifting System for Bamboo Product and Epidemic Tree Downhill[J]. Scientia Silvae Sinicae, 2026, 62(1): 177-187.
Table 1
The morphological characteristic parameters of bamboo products"
| 参数Parameter | 值Value | 平均值Average |
| 竹子长度Bamboo length/m | 18~25 | 20 |
| 竹梢长度Bamboo tip length/m | 2.8~5.0 | 3 |
| 竹梢最粗处直径Diameter at the thickest part of the bamboo tip/cm | 6~10 | 7.5 |
| 竹梢保留节数Number of nodes retained on the bamboo tip | 9~16 | 13 |
| 竹梢竹节间距Internode spacing of bamboo tip/cm | 17~39 | 23 |
| 一捆竹梢质量Mass of a bundle of bamboo tips/kg | 80~120 | 100 |
| 竹段长度Length of bamboo segment/m | 1.1~1.5 | 1.3 |
| 竹段质量Mass of bamboo segment/kg | 0.3~0.6 | 0.5 |

Fig.1
Physical image of bamboo products"
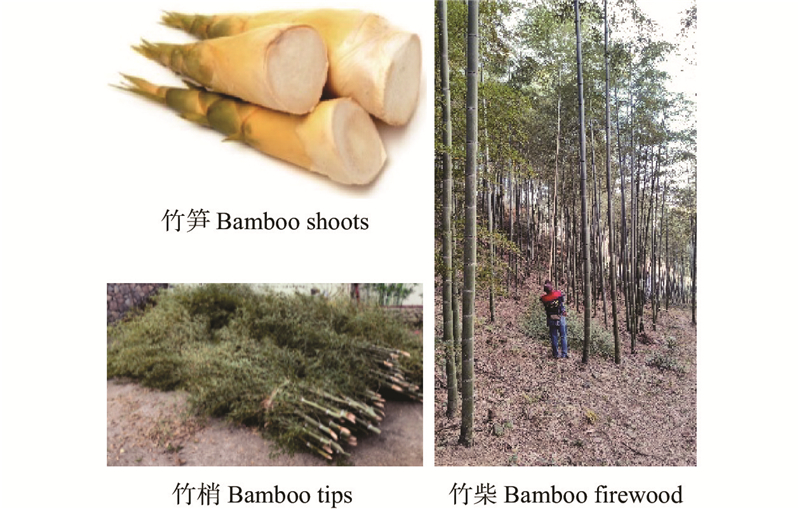

Fig.2
Overall structure of the lifting system"
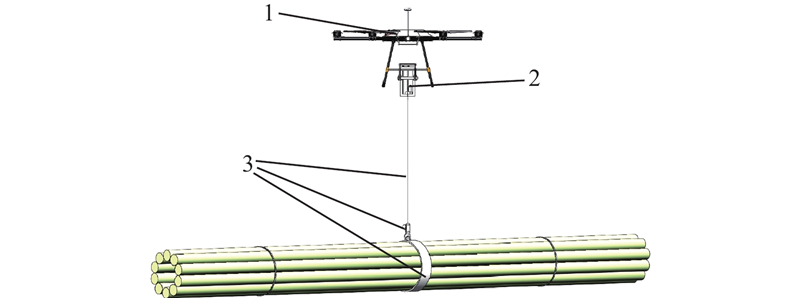

Fig.3
Packing methods using velcro, buckles, and knots"


Fig.4
Structure of the gravity hook device"


Fig.5
Structure of the active unhooking mechanism with electromagnet"
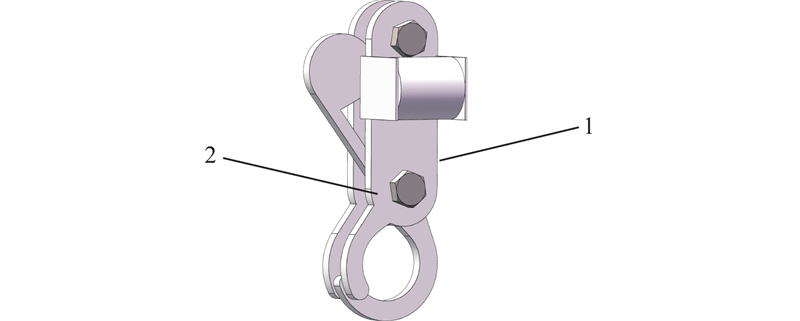

Fig.6
Schematic of the emergency unblocking device for drones"
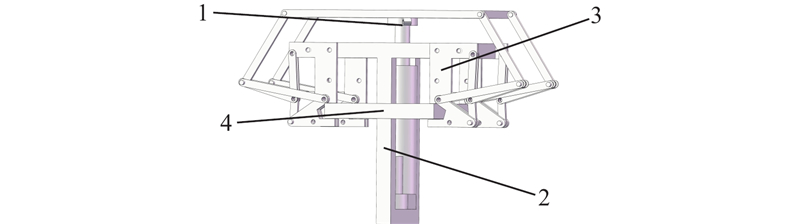

Fig.7
Schematic diagram of the control system structure"
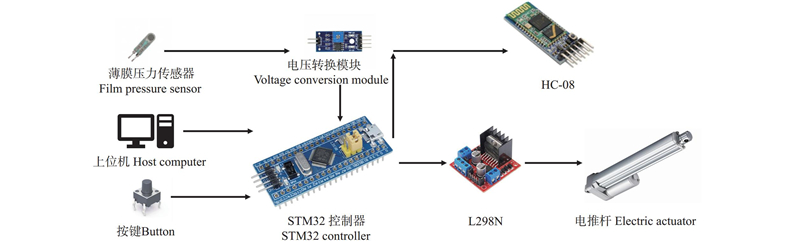

Fig.8
Finite element mesh division of the hook body for the automatic unhooking device"


Fig.9
Stress distribution of the hook body in the static analysis of the automatic unhooking device"

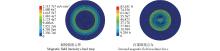
Fig.10
Static magnetic simulation results of the electromagnet"
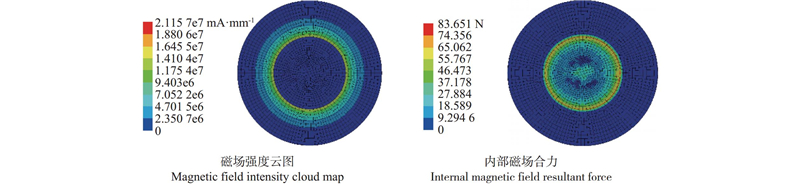
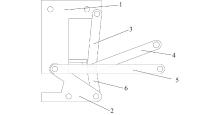
Fig.11
Clamping device of the emergency unblocking device for drones"
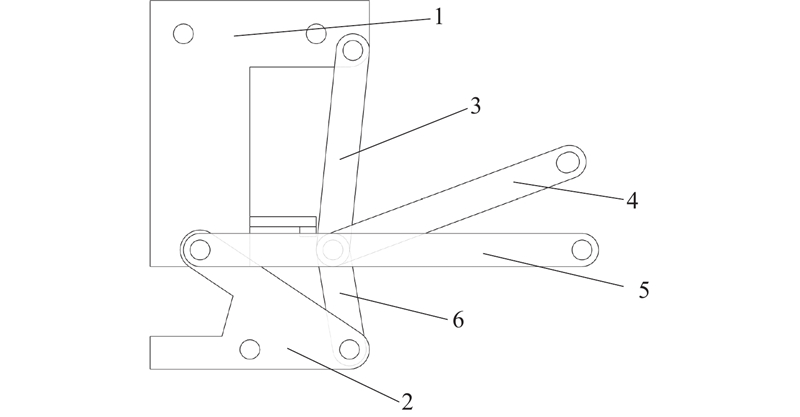

Fig.12
Clamping device schematic diagram"
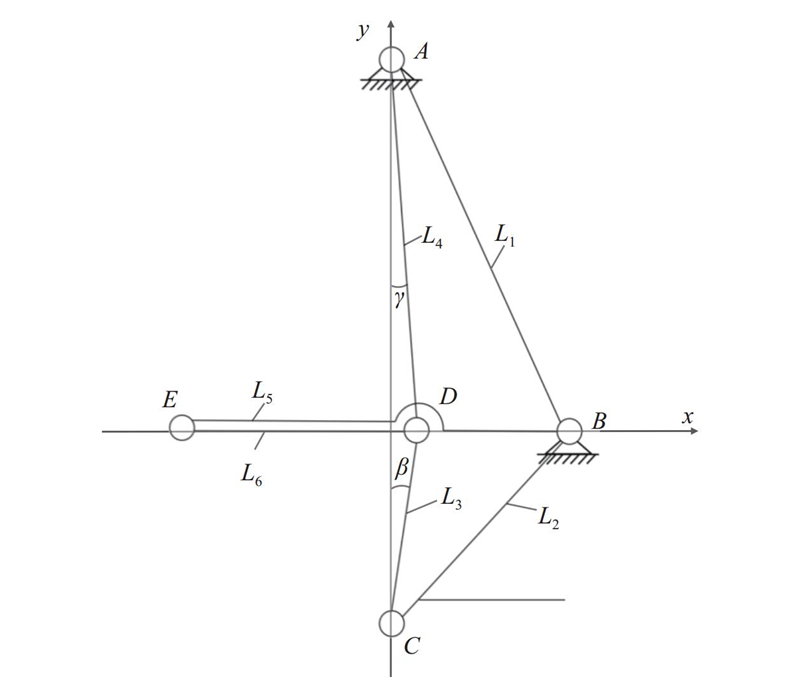
Fig.13
Force analysis diagram of the clamping device"
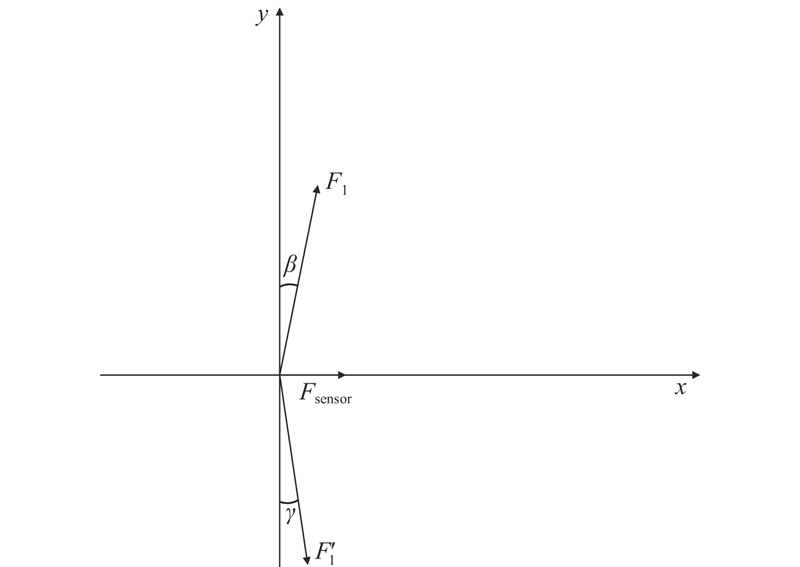

Fig.14
Finite element mesh division of the clamping device"
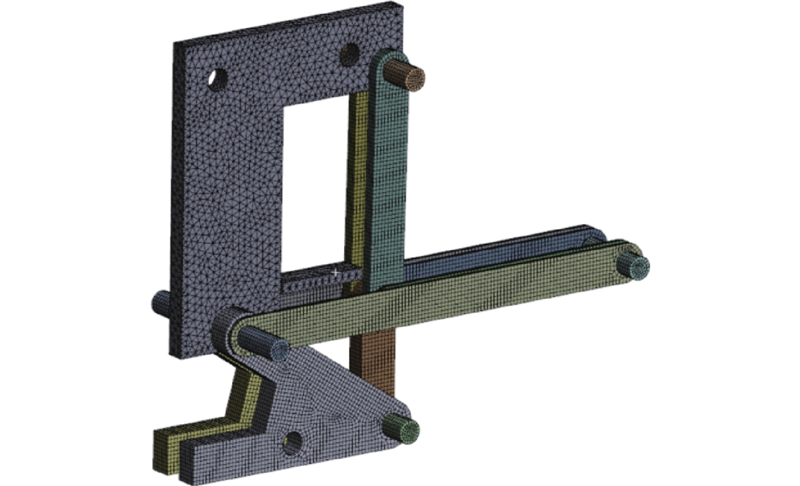

Fig.15
Static stress analysis results of the clamping device"
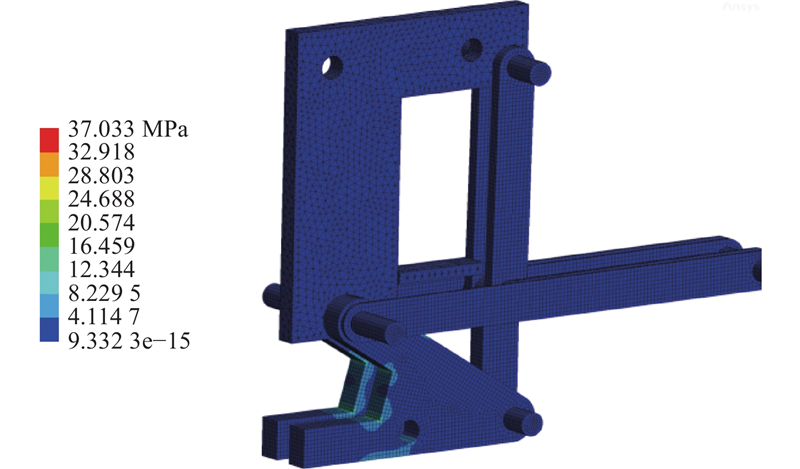

Fig.16
Indoor test of the lifting device"

Table 2
Bamboo parameters for indoor experiment"
| 竹参数Bamboo parameter | 平均值Average |
| 长度Length/m | 1.3 |
| 最粗处直径Diameter at the thickest part/cm | 9 |
| 个数Number | 2 |
| 一捆梢头质量Mass of a bundle of bamboo tips/kg | 1 |
Table 3
Packing test results s"
| 编号No. | 魔术贴Velcro | 凹扣Snap button | 绳结Knot |
| 1 | 22 | 21 | 26 |
| 2 | 21 | 22 | 25 |
| 3 | 19 | 21 | 27 |
| 4 | 23 | 24 | 27 |
| 5 | 20 | 23 | 24 |

Fig.17
Indoor test process of the lifting device"
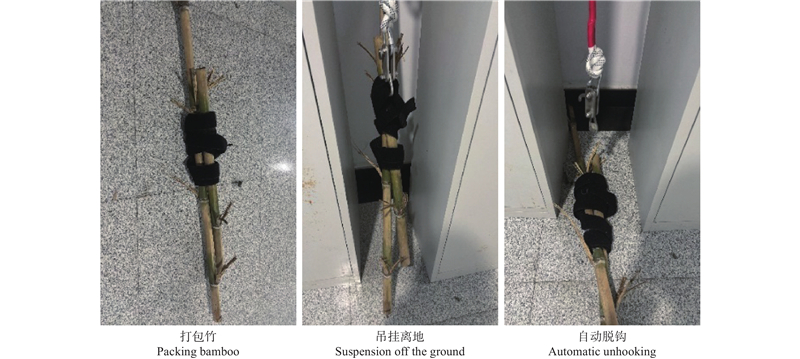
Table 4
Result of bamboo segment unhooking tests"
| 编号No. | 重力钩Gravity | 电磁主动钩Electromagnetic | 编号No. | 重力钩Gravity | 电磁主动钩Electromagnetic | |
| 1 | √ | √ | 6 | √ | √ | |
| 2 | √ | √ | 7 | √ | × | |
| 3 | √ | √ | 8 | × | √ | |
| 4 | √ | √ | 9 | √ | √ | |
| 5 | × | √ | 10 | √ | √ |
Table 5
Result of unblocking device tests"
| 编号No. | 脱困试验Escape test | 脱困耗时Escape duration/s |
| 1 | √ | 5.5 |
| 2 | √ | 5.3 |
| 3 | √ | 5.6 |
| 4 | √ | 5.5 |
| 5 | × | × |
| 6 | √ | 5.4 |
| 7 | √ | 5.3 |
| 8 | √ | 5.6 |
| 9 | √ | 5.5 |
| 10 | √ | 5.5 |
Table 6
UAV parameters"
| 技术参数Technical parameter | 数值Value |
| 无人机最大载荷UAV maximum load/kg | 50 |
| 无人机飞行速度UAV speed/(m·s?1) | 10 |
| 无人机悬停高度UAV hover height/m | 35 |
| 无人机遥控距离UAV control range/m | 3 000 |
| 无人机巡航时间UAV cruise time/min | 60 |
| 无人机电池容量UAV battery capacity/mAh | 40 000 |
| 无人机汽油机功率UAV gasoline engine power/kW | 20 |
| 无人机燃油容量UAV fuel capacity/L | 10 |
Table 7
Forest trial conditions"
| 竹段参数Bamboo segment parameter | 数值Value |
| 长度Length/m | 1.3 |
| 最粗处直径Diameter at the thickest part/cm | 9 |
| 个数Number | 5 |
| 一捆竹段质量Mass of a bundle of bamboo segments/kg | 3 |
Table 8
Result of unhooking in forest trials"
| 编号 No. | 脱钩 Unhooking | 挂钩 耗时 Hooking duration/s | 脱钩耗时 Unhooking duration/s | 编号 No. | 脱钩 Unhooking | 挂钩 耗时 Hooking duration/s | 脱钩耗时 Unhooking duration/s | |
| 1 | √ | 15.4 | 0.8 | 6 | √ | 15.6 | 0.8 | |
| 2 | √ | 13.2 | 1.2 | 7 | √ | 14.8 | 1.3 | |
| 3 | √ | 14.1 | 0.9 | 8 | √ | 12.7 | 1.4 | |
| 4 | × | 9 | √ | 14.2 | 1.0 | |||
| 5 | √ | 15.0 | 1.1 | 10 | √ | 17.2 | 1.2 |
Table 9
Results of escape in forest trials"
| 编号No. | 上升Ascend | 下降Descend | 前进Move forward |
| 1 | √ | √ | √ |
| 2 | × | √ | √ |
| 3 | √ | √ | √ |
| 4 | √ | √ | √ |
| 5 | × | √ | × |
| 6 | √ | × | √ |
| 7 | √ | √ | √ |
| 8 | √ | √ | √ |
| 9 | √ | √ | √ |
| 10 | √ | √ | √ |
Table 10
List of UAV and equipment cost"
| 项目Items | 价格Price/yuan |
| 无人机UAV | 80 000 |
| 脱困装置 Emergency rescue device | 1 200 |
| 重力脱钩装置Gravity-release mechanism | 110 |
| 电磁铁脱钩装置Electromagnetic release mechanism | 198 |
| 吊运设备控制系统Hoisting equipment control system | 800 |
| 合计Total | 82 308 |
| 陈吉朋, 王 凯, 陈佳佳, 等. 双轨式油茶果采摘机器人的动力轨道平台设计. 林业工程学报, 2025, 10 (2): 138- 146. | |
| Chen J P, Wang K, Chen J J, et al. Design of a dual track power platform of Camellia oleifera fruit picking robot. Journal of Forestry Engineering, 2025, 10 (2): 138- 146. | |
| 陈幸良, 窦亚权. 发展竹林林下经济 做大做强竹业产业. 世界竹藤通讯, 2023, 21 (5): 1- 7. | |
| Chen X L, Dou Y Q. Developing non-timber bamboo-forest-based economy for building a strong and bigger bamboo industry. World Bamboo and Rattan, 2023, 21 (5): 1- 7. | |
| 冯鹏飞, 李玉敏. 2021年中国竹资源报告. 世界竹藤通讯, 2023, 21 (2): 100- 103. | |
| Feng P F, Li Y M. China’s bamboo resources in 2021. World Bamboo and Rattan, 2023, 21 (2): 100- 103. | |
| 韩东涛, 马跃威. 2025. 融合生态扰动控制的森林采伐-运输多目标优化调度方法. 森林工程, https://link.cnki.net/urlid/23.1388.S.20250619.1705.002. | |
| Han D T, Ma Y W. 2025. Multi-objective scheduling optimization for forest harvesting and transportation with integrated ecological disturbance control. Forest Engineering, https://link.cnki.net/urlid/23.1388.S.20250619.1705.002. [in Chinese] | |
| 贵州省林业厅. 赤水楠竹场动力架空索道简介. 林业机械, 1966 (4): 26- 27. | |
| Guizhou Forestry Bureau. Introduction of the power overhead cableway in Chishui moso bamboo plantation. Forestry Machinery, 1966 (4): 26- 27. | |
| 蒋鹏飞, 张 彬, 周建波, 等. 竹片粗铣连续化定向进料系统设计与试验. 林业科学, 2022, 58 (6): 128- 140. | |
| Jiang P F, Zhang B, Zhou J B, et al. Design and experiment of continuous directional feeding system for bamboo slice milling. Scientia Silvae Sinicae, 2022, 58 (6): 128- 140. | |
| 雷永杰, 周建波, 傅万四, 等. 竹材索道集材运输装备跑车及悬索的设计与分析. 浙江农林大学学报, 2023, 40 (6): 1348- 1356. | |
| Lei Y J, Zhou J B, Fu W S, et al. Design and analysis of bamboo cableway skidding transportation equipment sports car and suspension cable. Journal of Zhejiang A & F University, 2023, 40 (6): 1348- 1356. | |
| 李 玲, 谭诒帅, 张建民, 等. 重组竹内置钢筋后受弯性能有限元分析. 森林工程, 2024, 40 (6): 151- 158. | |
| Li L, Tan Y S, Zhang J M, et al. Finite element analysis on bending performance of bamboo scrimber with built-in reinforcement. Forest Engineering, 2024, 40 (6): 151- 158. | |
| 陆美珍, 杨倩倩, 陈碧芽, 等. 竹材无动力管道运送下山新技术. 世界竹藤通讯, 2018, 16 (5): 39- 41. | |
| Lu M Z, Yang Q Q, Chen B Y, et al. A new technology to transport bamboo downhill via non-powered pipeline. World Bamboo and Rattan, 2018, 16 (5): 39- 41. | |
| 宋月鹏, 张红梅, 高东升, 等. 国内丘陵山地果园运输机械发展现状与趋势. 中国农机化学报, 2019, 40 (1): 50- 55, 67. | |
| Song Y P, Zhang H M, Gao D S, et al. Development status and trend of domestic orchard transportation machinery in hilly and mountainous areas. Journal of Chinese Agricultural Mechanization, 2019, 40 (1): 50- 55, 67. | |
| 吴纯彪. 2023. 竹子绳索挂式运输导轮组设计与制作. 杭州: 浙江农林大学. | |
| Wu C B. 2023. Design and manufacture of bamboo rope hanging transport guide wheel group. Hangzhou: Zhejiang A & F University. [in Chinese] | |
| 徐 薇, 唐 辉, 柳丽娜, 等. 基于竹资源高效利用的浙江安吉竹产业发展建议. 世界竹藤通讯, 2024, 22 (3): 124- 127. | |
| Xu W, Tang H, Liu L N, et al. Development suggestions of bamboo industry based on efficient utilization of bamboo resources in Anji County, Zhejiang Province. World Bamboo and Rattan, 2024, 22 (3): 124- 127. | |
| 杨 方, 周 敏, 江溢华, 等. 丘陵山地环形单轨运输系统静态调度优化方法. 农业工程学报, 2023, 39 (4): 37- 46. | |
| Yang F, Zhou M, Jiang Y H, et al. Static scheduling optimization method for the circular monorail transportation system in hilly and mountainous areas. Transactions of the Chinese Society of Agricultural Engineering, 2023, 39 (4): 37- 46. | |
| 叶 鹏, 叶昌民, 周彤悦, 等. 浙江省近自然毛竹林空间结构特征. 浙江农林大学学报, 2020, 37 (2): 228- 234. | |
| Ye P, Ye C M, Zhou T Y, et al. Spatial structure characteristics of close-to-nature Phyllostachys edulis forests in Zhejiang Province. Journal of Zhejiang A & F University, 2020, 37 (2): 228- 234. | |
| 俞国红, 郑 航, 符康强. 2024. 一种山地竹林轻简型运输装置及其布置方法: CN117657681A. 2024−03−08. | |
| Yu G H, Zheng H, Fu K Q. 2024. A lightweight transport device and its arrangement method for mountainous bamboo forests: CN117657681A. 2024−03−08. [in Chinese] | |
| 张火亮, 翁祖强, 魏 恒. 一种适应丘陵山地的竹材运输装置: CN118723456A. 2024−10−01. | |
| Zhang H L, Weng Z Q, Wei H. Bamboo transporting device suitable for hills and mountains: CN118723456A. 2024−10−01.[in Chinese] | |
| Guerra S P S, Oguri G, de Jesus Eufrade H, et al. Mechanized harvesting of bamboo plantations for energy production: preliminary tests with a cut-and-shred harvester. Energy for Sustainable Development, 2016, 34, 62- 66. | |
| Lobovikov M, Schoene D, Yping L. Bamboo in climate change and rural livelihoods. Mitigation and Adaptation Strategies for Global Change, 2012, 17 (3): 261- 276. |
| [1] | Yujiao Zhang,Hengqian Zhao,Hancong Fu,Ge Liu,Xiadan Huangfu,Xuanqi Liu. Inversion Model of Aboveground Biomass at Individual Tree Scale Based on the Multiple Features of UAV Remote Sensing [J]. Scientia Silvae Sinicae, 2025, 61(8): 129-141. |
| [2] | Xiaoyan Xiong,Caixia Li,Guoqi Chai,Long Chen,Xiang Jia,Lingting Lei,Xiaoli Zhang. Estimation of Aboveground Biomass in Regional Forests by Using Integrating UAV-LiDAR and GEDI Data [J]. Scientia Silvae Sinicae, 2025, 61(8): 142-153. |
| [3] | Xiaohui Yang,Jinzhuo Wu,Haoran Liu,Hao Zhong,Wenshu Lin. Estimation on Canopy Closure for Plantation Forests Based on UAV-LiDAR [J]. Scientia Silvae Sinicae, 2023, 59(8): 12-21. |
| [4] | Xuzhan Guo,Qiao Chen,Xiaofang Zhang,Liang Hong,Yuanyuan You,Shouzheng Tang,Liyong Fu. Extraction of Healthy Canopy of New Afforestation for Pinus tabulaeformis Based on UAV High-Resolution Image [J]. Scientia Silvae Sinicae, 2022, 58(10): 111-120. |
| [5] | Xiaocheng Zhou,Lei Zheng,Hongyu Huang. Classification of Forest Stand Based on Multi-Feature Optimization of UAV Visible Light Remote Sensing [J]. Scientia Silvae Sinicae, 2021, 57(6): 24-36. |
| [6] | Yadong Li,Minglan Cao,Changqing Li,Zhongke Feng. Partition Matching Strategy of UAV Aerial Photographic Images in Forests Based on POS Constraints [J]. Scientia Silvae Sinicae, 2020, 56(10): 113-120. |
| [7] | Bochao Cui,Jianghua Zheng,Zhongjun Liu,Tao Ma,Jianglong Shen,Xuemi Zhao. YOLOv3 Mouse Hole Recognition Based on Remote Sensing Images from Technology for Unmanned Aerial Vehicle [J]. Scientia Silvae Sinicae, 2020, 56(10): 199-208. |
| [8] | Xiangqian Wu,Lin Cao,Xin Shen,Guibin Wang,Fuliang Cao. Estimation of Effective Leaf Area Index Using UAV-Based LiDAR in Ginkgo Plantations [J]. Scientia Silvae Sinicae, 2020, 56(1): 74-86. |
| [9] | Wang Wei, Yang Junjie, Luo Xiaoying, Zhou Changjiang, Chen Shifa, Yang Zhijun, Hou Rongfeng, Chen Zaixiong, Li Yongsheng. Assessment of Potential Habitat for Firmiana danxiaensis, a Plant Species with Extremely Small Populations in Danxiashan National Nature Reserve Based on Maxent Model [J]. Scientia Silvae Sinicae, 2019, 55(8): 19-27. |
| [10] | Li Dan, Zhang Junjie, Zhao Mengxi. Extraction of Stand Factors in UAV Image Based on FCM and Watershed Algorithm [J]. Scientia Silvae Sinicae, 2019, 55(5): 180-187. |
| [11] | Zhou Xiaocheng, He Yi, Huang Hongyu, Xu Xueqin. Estimation of Forest Stand Volume on Coniferous Forest Cutting Area Based on Two Periods Unmanned Aerial Vehicle Images [J]. Scientia Silvae Sinicae, 2019, 55(11): 117-125. |
| [12] | Wen Amin, Zheng Jianghua, Chen Meng, Mu Chen, Ma Tao. Monitoring Mouse-Hole Density by Rhombomys opimus in Desert Forests with UAV Remote Sensing Technology [J]. Scientia Silvae Sinicae, 2018, 54(4): 186-192. |
| [13] | Zhou Yucheng, Song Mingliang, Ma Yan, Yang Chunmei, Zhang Jiawei, Deng Yingjian, Jiang Ting. Design of Solar Energy-Storage Flooring and Simulation Analysis of Heat Transfer Modeling [J]. Scientia Silvae Sinicae, 2018, 54(11): 149-157. |
| [14] | Ma Tao, Zheng Jianghua, Wen Amin, Chen Meng, Mu Chen. Relationship between the Distribution of Rhombomys opimus Holes and the Topography in Desert Forests Based on Low-Altitude Remote Sensing with the Unmanned Aerial Vehicle (UAV): A Case Study at the Southern Margin of the Gurbantunggut Desert in Xinjiang, China [J]. Scientia Silvae Sinicae, 2018, 54(10): 180-188. |
| [15] | Liu Qingwang, Li Shiming, Li Zengyuan, Fu Liyong, Hu Kailong. Review on the Applications of UAV-Based LiDAR and Photogrammetry in Forestry [J]. Scientia Silvae Sinicae, 2017, 53(7): 134-148. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||