
Scientia Silvae Sinicae ›› 2020, Vol. 56 ›› Issue (10): 199-208.doi: 10.11707/j.1001-7488.20201022
Bochao Cui1,2,Jianghua Zheng1,2,*,Zhongjun Liu3,Tao Ma1,2,Jianglong Shen1,2,Xuemi Zhao1,2
Received:2019-07-04
Online:2020-10-25
Published:2020-11-26
Contact:
Jianghua Zheng
CLC Number:
Bochao Cui,Jianghua Zheng,Zhongjun Liu,Tao Ma,Jianglong Shen,Xuemi Zhao. YOLOv3 Mouse Hole Recognition Based on Remote Sensing Images from Technology for Unmanned Aerial Vehicle[J]. Scientia Silvae Sinicae, 2020, 56(10): 199-208.
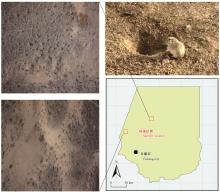
Fig.1
Experimental area"
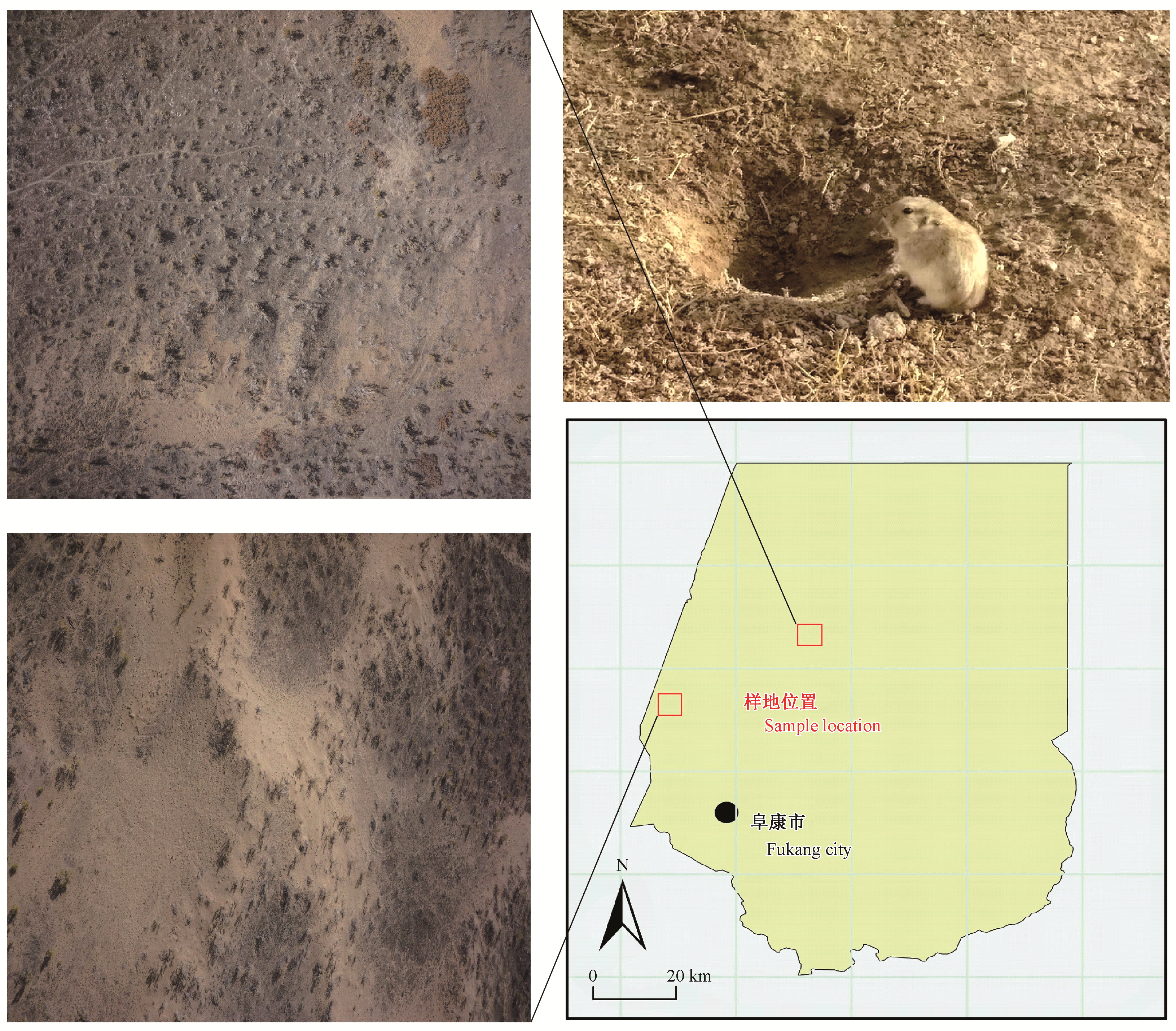
Table 1
Aerial equipment parameters"
| 名称 Name | 参数 Parameter | 数值 Value |
| DOPSV360无人机 DOPSV360 UAV | 最大起飞质量Maximum take-off mass/kg | 5.5 |
| 机身翼展长×宽×高Fuselage wingspan× width× height | 2 000 mm× 1 300 mm× 400 mm | |
| 最大飞行高度Maximum flight altitude/m | 5 000 | |
| 最大水平飞行速度Maximum horizontal speed/(m·s-1) | 19.4 | |
| 最大飞行时间Maximum flight time/min | 90 | |
| 通讯半径Communication radius/km | 30 | |
| 正常工作风力允许等级Normal working wind | 4 | |
| 索尼NEX7相机 Sony NEX7 camera | 质量Mass/g | 291 |
| 传感器尺寸Sensor size | 35.9 mm×24 mm | |
| 有效像素Effective pixels | 24 300 000 | |
| 最高分辨率Maximum resolution(pixels) | 6 000×4 000 | |
| 索尼ilce-7m相机 Sony ilce-7m camera | 质量Mass/g | 407 |
| 传感器尺寸Sensor size | 23.4 mm×15.6 mm | |
| 有效像素Effective pixels | 36 400 000 | |
| 最高分辨率Maximum resolution(pixels) | 7 360×4 912 |

Fig.2
Data set establishment process"
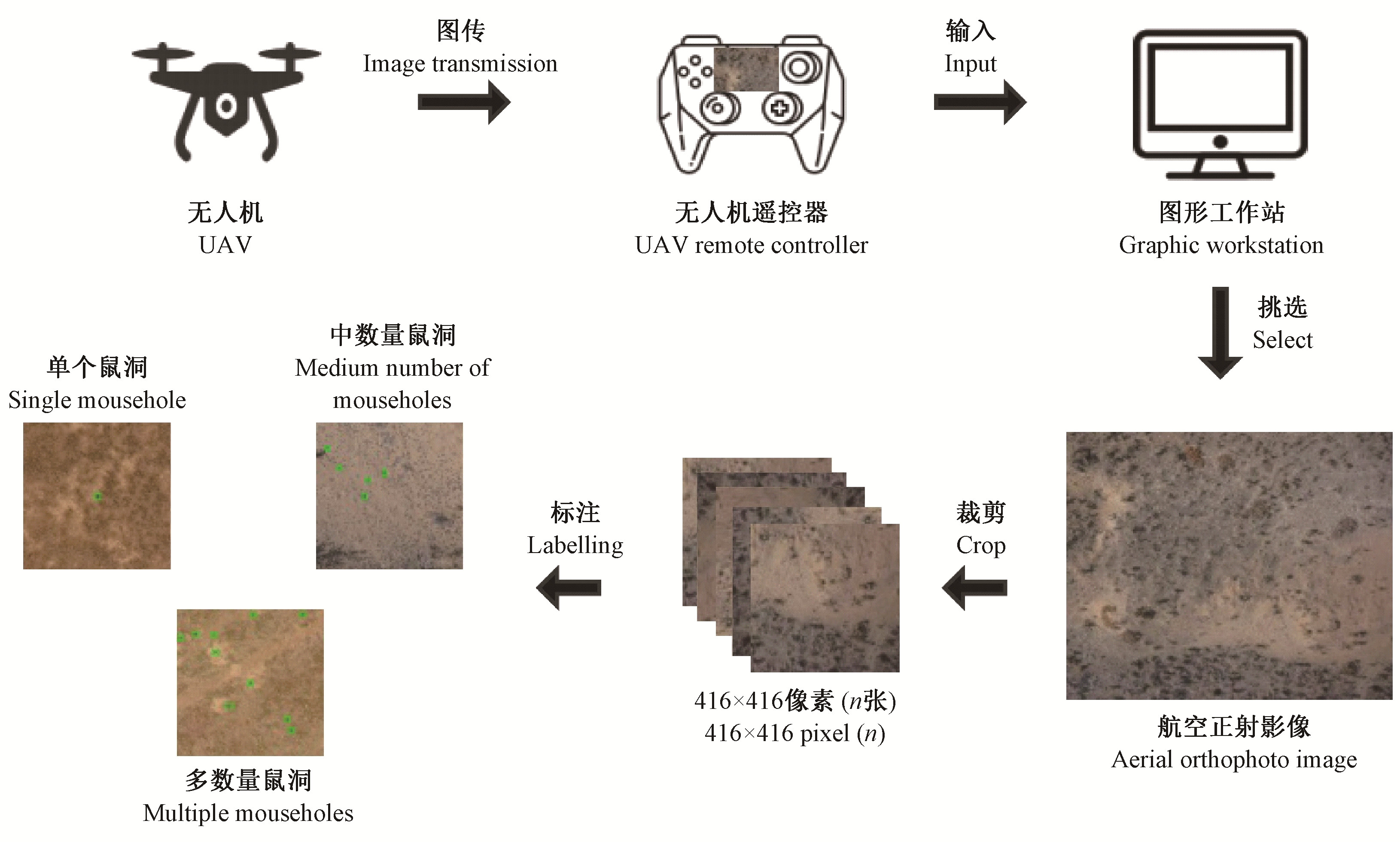

Fig.3
YOLOv3 structure"


Fig.4
YOLOv3-tiny structure"
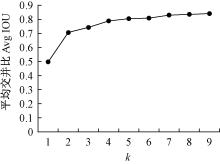
Fig.5
k-means clustering analysis result"
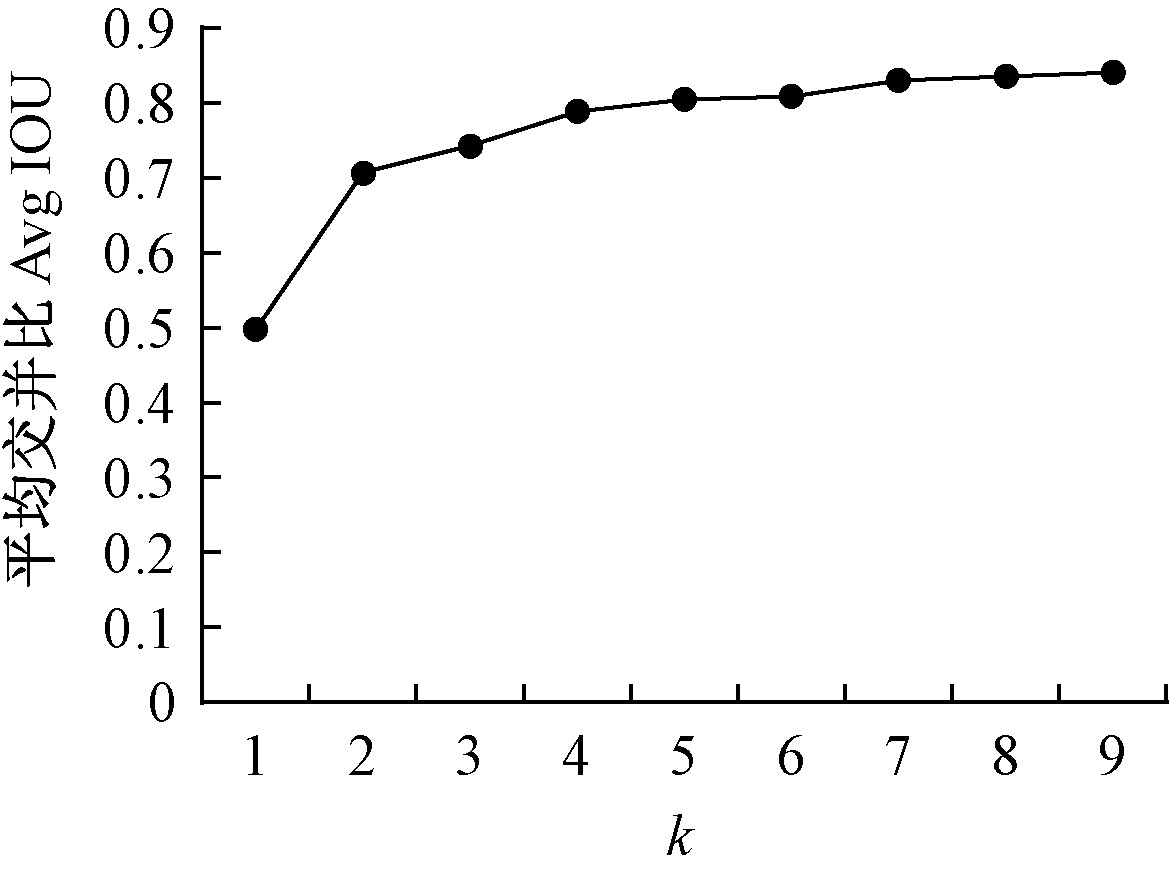

Fig.6
Loss curve and Avg IOU curve"
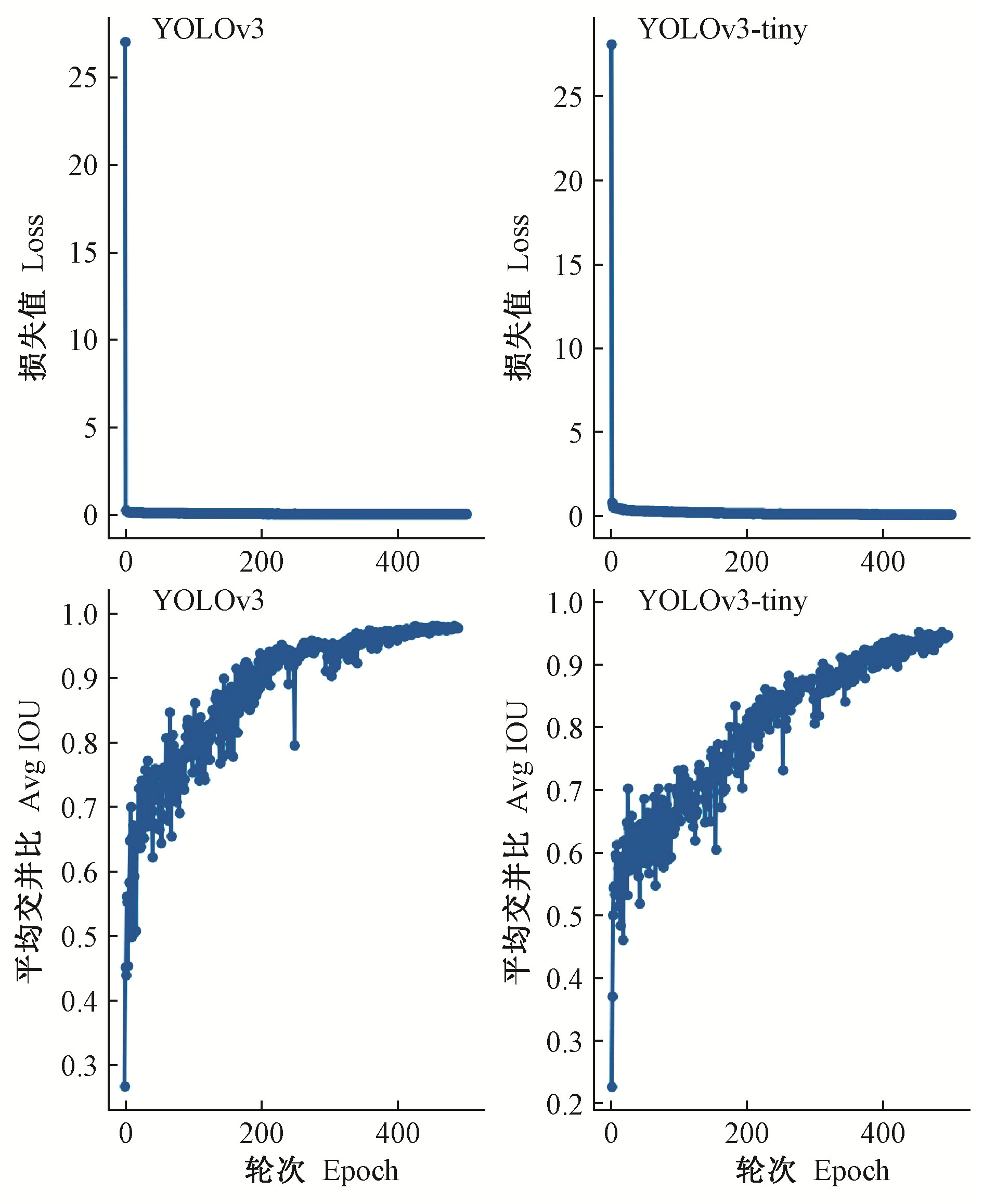
Table 2
Comparison of target detection results of different networks"
| 网络 Network | 真正例 TP | 假正例 FP | 假负例 FN | 准确率 P(%) | 召回率 R(%) |
| YOLOv3 | 589 | 56 | 32 | 91.3 | 94.8 |
| YOLOv3-tiny | 513 | 86 | 78 | 85.6 | 86.8 |
Fig.7
YOLOv3(a) and YOLOv3-tiny(b) target detection framework AP curve"
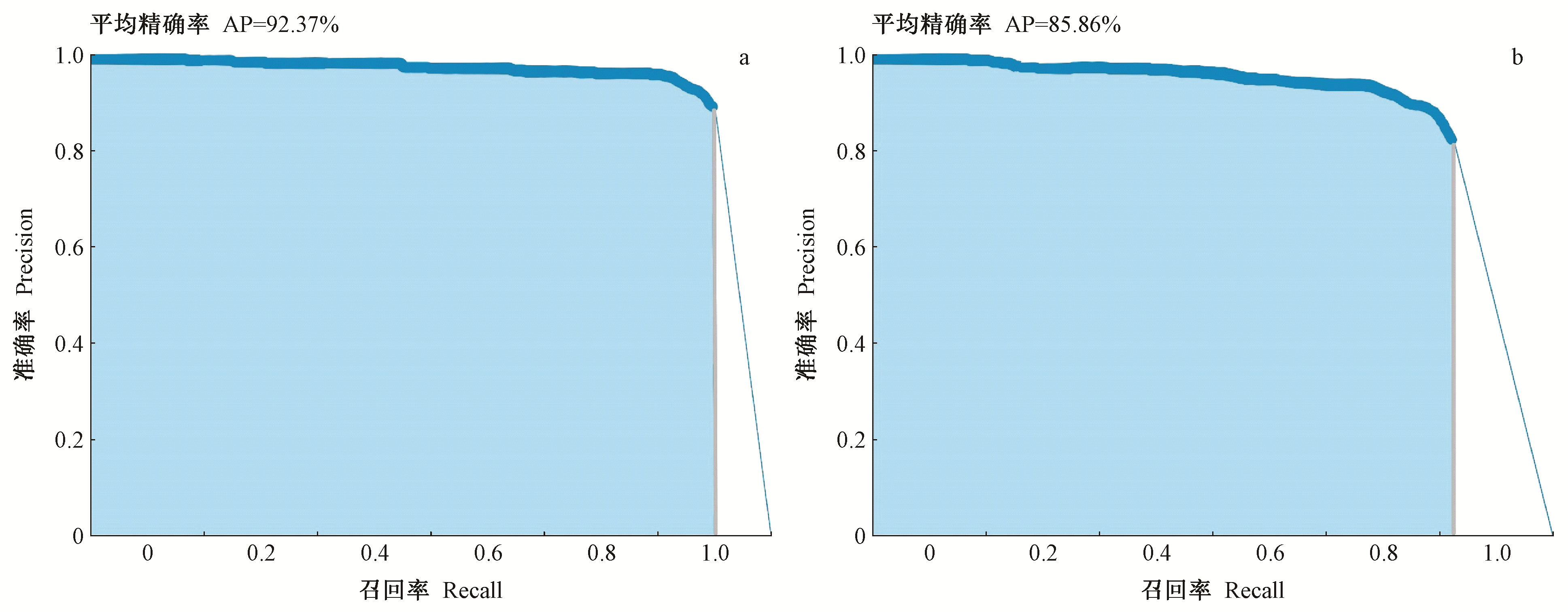
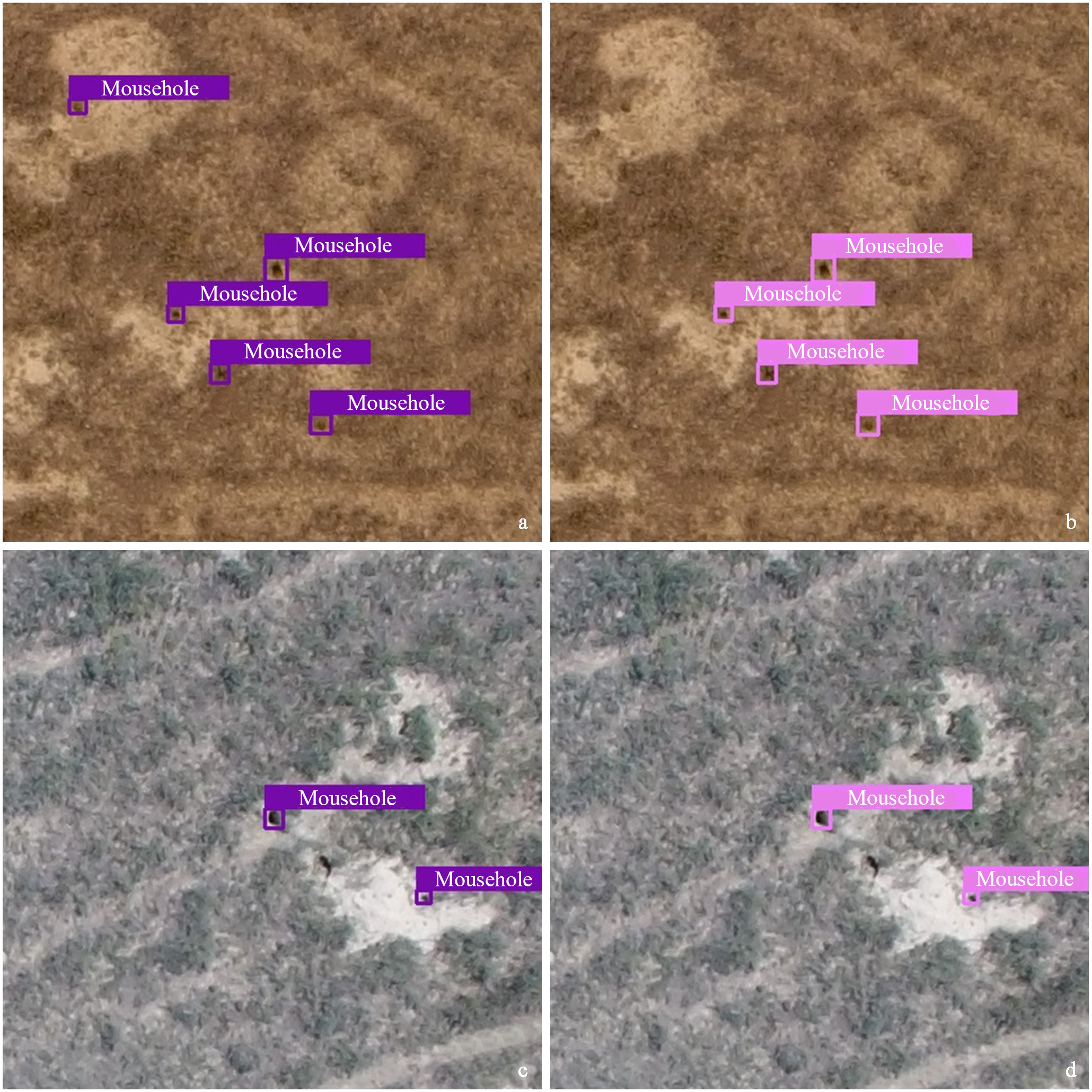
Fig.8
Sample test results of typical test samples for mousehole"
| 陈梦, 杨永刚, 刘忠军, 等. 新疆昌吉州荒漠林害鼠种类调查初报. 防护林科技, 2014. (7): 37- 39. | |
| Chen M , Yang Y G , Liu Z J , et al. Investigation on rodent species in desert forest of Changji prefecture in Xinjiang. Protection Forest Science and Technology, 2014. (7): 37- 39. | |
| 冯文武, 阿地力·沙塔尔. 昌吉市荒漠林鼠害种类调查及其防治技术研究. 防护林科技, 2014. (2): 8- 11, 13. | |
| Feng W W , Adili Shatar . Investigation on rodent species in desert forest of changji city and its control technology. Protection Forest Science and Technology, 2014. (2): 8- 11, 13. | |
| 黄建文, 鞠洪波, 特木钦, 等. 阿拉善左旗天然梭梭林鼠害防治的遥感监测. 林业科学, 2004. 40 (3): 107- 110. | |
| Huang J W , Ju H B , Te M Q , et al. Monitoring on controlling effect of rhombomys opimus in haloxylon ammodendron bunge stands using remote sensing TM imagery in Alashan. Scientia Silvae Sinicae, 2004. 40 (3): 107- 110. | |
| 康淑红. 新疆草原鼠害的综合防治技术分析. 当代畜牧, 2015. (32): 41- 42. | |
| Kang S H . Comprehensive control technique analysis of rodent pests in grassland in Xinjiang. Modern Animal Husbandry, 2015. (32): 41- 42. | |
| 梁倩玲, 刘萍, 陈梦, 等. 林业有害生物灾害损失评估研究进展. 林业资源管理, 2015. (2): 139- 144. | |
| Liang Q L , Liu P , Chen M , et al. Research review on forest pest disaster losse assessment. Forest Resources Management, 2015. (2): 139- 144. | |
| 马涛, 郑江华, 温阿敏, 等. 基于UAV低空遥感的荒漠林大沙鼠洞群覆盖率及分布特征研究——以新疆古尔班通古特沙漠南缘局部为例. 生态学报, 2018a. 38 (3): 953- 963. | |
| Ma T , Zheng J H , Wen A M , et al. Group coverage of burrow entrances and distribution characteristics of desert forest-dwelling Rhombomys opimus based on unmanned aerial vehicle(UAV) low-altitude remote sensing:A case study at the southern margin of the Gurbantunggut Desert in Xinjiang. Acta Ecologica Sinica, 2018a. 38 (3): 953- 963. | |
| 马涛, 郑江华, 温阿敏, 等. 基于无人机低空遥感的荒漠林大沙鼠鼠洞分布与地形的关系——以新疆古尔班通古特沙漠南缘局部为例. 林业科学, 2018b. 54 (10): 180- 188. | |
| Ma T , Zheng J H , Wen A M , et al. Relationship between the distribution of Rhombomys opimus holes and the topography in desert forests based on low-altitude remote sensing with the unmanned aerial vehicle(UAV):a case study at the southern margin of the Gurbantunggut desert in Xinjiang, China. Scientia Silvae Sinicae, 2018b. 54 (10): 180- 188. | |
| 盛兆湖, 陈梦, 刘忠军, 等. 新疆昌吉州荒漠林鼠(兔)害灾害损失评估指标重要性研究. 中国森林病虫, 2015. 34 (1): 14- 17, 22. | |
| Sheng Z H , Chen M , Liu Z J , et al. Importance of loss evaluation indexes of rodent disaster in the desert forests in Changji, Xinjiang Uygur Autonomous Region. Forest Pest and Disease, 2015. 34 (1): 14- 17, 22. | |
| 孙迪, 倪亦非, 陈吉军, 等. 应用无人机(UAV)低空影像监测黄兔尾鼠鼠洞初探. 中国植保导刊, 2019. 39 (4): 35- 43. | |
| Sun D , Ni Y F , Chen J J , et al. Application of UAV low-altitude image on rathole monitoring of Eolagurus luteus. China Plant Protection, 2019. 39 (4): 35- 43. | |
| 孙钰, 周焱, 袁明帅, 等. 基于深度学习的森林虫害无人机实时监测方法. 农业工程学报, 2018. 34 (21): 74- 81. | |
| Sun Y , Zhou Y , Yuan M S , et al. UAV real-time monitoring for forest pest based on deep learning. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018. 34 (21): 74- 81. | |
| 王术波, 韩宇, 陈建, 等. 基于深度学习的无人机遥感生态灌区杂草分类. 排灌机械工程学报, 2018. 36 (11): 1137- 1141. | |
| Wang S B , Han Y , Chen J , et al. Weed classification of remote sensing by UAV in ecological irrigation areas based on deep learning. Journal of drainage and irrigation machinery engineering(JDIME), 2018. 36 (11): 1137- 1141. | |
| 温阿敏, 郑江华, 陈梦, 等. 荒漠生态林区大沙鼠鼠洞密度的无人机遥感监测技术初探. 林业科学, 2018. 54 (4): 186- 192. | |
| Wen A M , Zheng J H , Chen M , et al. Monitoring mouse-hole density by Rhombomys opimus in desert forests with UAV remote sensing technology. Scientia Silvae Sinicae, 2018. 54 (4): 186- 192. | |
| 徐正刚, 赵运林, 李波, 等. 洞庭湖区东方田鼠灾害预警分析. 生态学杂志, 2013. 32 (10): 2830- 2836. | |
| Xu Z G , Zhao Y L , Li B , et al. Forecast of Microtus fortis disaster in Dongting Lake region of China. Chinese Journal of Ecology, 2013. 32 (10): 2830- 2836. | |
| 轩俊伟, 郑江华, 倪亦非, 等. 基于动力三角翼平台的草原鼠害遥感监测研究. 中国植保导刊, 2015. 35 (2): 52- 55. | |
| Xuan J W , Zheng J H , Ni Y F , et al. Remote sensing monitoring of rodent infestation in grassland based on dynamic delta-wing platform. China Plant Protection, 2015. 35 (2): 52- 55. | |
| 杨红艳, 杜健民, 王圆, 等. 基于无人机遥感与卷积神经网络的草原物种分类方法. 农业机械学报, 2019. 50 (4): 188- 195. | |
| Yang H Y , Du J M , Wang Y , et al. Classification method of grassland species based on Unmanned Aerial Vehicle remote sensing and Convolutional Neural Network. Transactions of the Chinese Society for Agricultural Machinery, 2019. 50 (4): 188- 195. | |
| 郑二功, 田迎芳, 陈涛, 等. 基于深度学习的无人机影像玉米倒伏区域提取. 河南农业科学, 2018. 47 (8): 155- 160. | |
| Zheng E G , Tian Y F , Chen T , et al. Region extraction of corn lodging in UAV images based on deep learning. Journal of Hennan Agricultural Sciences, 2018. 47 (8): 155- 160. | |
| 周晓琳, 安如, 陈跃红, 等. 三江源典型区鼠洞无人机遥感识别研究. 亚热带资源与环境学报, 2018. 13 (4): 85- 92. | |
| Zhou X L , An R , Chen Y H , et al. Identification of rat holes in the typical area of"Three-River Headwaters"region By UAV remote sensing. Journal of Subtropical Resources and Environment, 2018. 13 (4): 85- 92. | |
|
Addink E A , De Jong S M , Davis S A , et al. The use of high-resolution remote sensing for plague surveillance in Kazakhstan. Remote Sens Environ, 2010. 114, 674- 681.
doi: 10.1016/j.rse.2009.11.015 |
|
| Everingham M , Eslami S M A , Gool L V , et al. The pascalvisual object classes challenge:A retrospective. International Journal of Computer Vision, 2015. 111 (1): 98- 136. | |
|
Kausrud K L , Viljugrein H , Frigessi A , et al. Climatically driven synchrony of gerbil populations allows large-scale plague outbreaks. Proc R Soc B Biol Sci, 2007. 274, 1963- 1969.
doi: 10.1098/rspb.2007.0568 |
|
| Redmon J , Divvala S , Girshick R , et al. You only look once:unified, real-time object detection. IEEE Conference on Computer Vision and Pattern Recognition, 2016. 779- 788. | |
|
Ren S , He K , Girshick R B , et al. Faster R-CNN:towards real-time object detection with region proposal networks. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017. 39 (6): 1137- 1149.
doi: 10.1109/TPAMI.2016.2577031 |
|
| Redmon J , Farhadi A . YOLO9000:better, faster, stronger. IEEE Conference on Computer Vision and Pattern Recognition, 2017. 6517- 6525. | |
| Redmon J, Farhadi A. 2018. YOLOv3: an incremental improvement. IEEE Conference on Computer Vision and Pattern Recognition, arXiv preprint arXiv: 1804.02767. |
| [1] | Huiru Zhang,Xiangdong Lei,Fengri Li. Research Progress and Prospects of Forest Management Science in China [J]. Scientia Silvae Sinicae, 2020, 56(9): 130-142. |
| [2] | Jinying Xie,Lixia Ding,Zhihui Wang,Lijuan Liu. Classification of Coastal Wetland Vegetation Utilizing FCN and Object-Oriented Methods [J]. Scientia Silvae Sinicae, 2020, 56(8): 98-106. |
| [3] | Yadong Li,Minglan Cao,Changqing Li,Zhongke Feng. Partition Matching Strategy of UAV Aerial Photographic Images in Forests Based on POS Constraints [J]. Scientia Silvae Sinicae, 2020, 56(10): 113-120. |
| [4] | Xiangqian Wu,Lin Cao,Xin Shen,Guibin Wang,Fuliang Cao. Estimation of Effective Leaf Area Index Using UAV-Based LiDAR in Ginkgo Plantations [J]. Scientia Silvae Sinicae, 2020, 56(1): 74-86. |
| [5] | Wang Wei, Yang Junjie, Luo Xiaoying, Zhou Changjiang, Chen Shifa, Yang Zhijun, Hou Rongfeng, Chen Zaixiong, Li Yongsheng. Assessment of Potential Habitat for Firmiana danxiaensis, a Plant Species with Extremely Small Populations in Danxiashan National Nature Reserve Based on Maxent Model [J]. Scientia Silvae Sinicae, 2019, 55(8): 19-27. |
| [6] | Li Dan, Zhang Junjie, Zhao Mengxi. Extraction of Stand Factors in UAV Image Based on FCM and Watershed Algorithm [J]. Scientia Silvae Sinicae, 2019, 55(5): 180-187. |
| [7] | Xia Yongjie, Pang Yong, Liu Luxia, Chen Bowei, Dong Bin, Huang Qingfeng. Forest Height Growth Monitoring of Cunninghamia lanceolata Plantation Using Multi-Temporal Aerial Photography with the Support of High Accuracy DEM [J]. Scientia Silvae Sinicae, 2019, 55(4): 108-121. |
| [8] | Song Yining, Liu Wenping, Luo Youqing, Zong Shixiang. Monitoring of Dead Trees in Forest Images Based on Linear Spectral Clustering [J]. Scientia Silvae Sinicae, 2019, 55(4): 187-195. |
| [9] | Zhou Xiaocheng, He Yi, Huang Hongyu, Xu Xueqin. Estimation of Forest Stand Volume on Coniferous Forest Cutting Area Based on Two Periods Unmanned Aerial Vehicle Images [J]. Scientia Silvae Sinicae, 2019, 55(11): 117-125. |
| [10] | Jinhua Mo,Jia Li,Fang Liu,Xiaoguan Li,Diqiang Li. A Survey of Mammals and Birds Diversity in Jianfengling District of Hainan Province by Using Camera-Trapping [J]. Scientia Silvae Sinicae, 2019, 55(10): 203-210. |
| [11] | Wen Amin, Zheng Jianghua, Chen Meng, Mu Chen, Ma Tao. Monitoring Mouse-Hole Density by Rhombomys opimus in Desert Forests with UAV Remote Sensing Technology [J]. Scientia Silvae Sinicae, 2018, 54(4): 186-192. |
| [12] | Ma Tao, Zheng Jianghua, Wen Amin, Chen Meng, Mu Chen. Relationship between the Distribution of Rhombomys opimus Holes and the Topography in Desert Forests Based on Low-Altitude Remote Sensing with the Unmanned Aerial Vehicle (UAV): A Case Study at the Southern Margin of the Gurbantunggut Desert in Xinjiang, China [J]. Scientia Silvae Sinicae, 2018, 54(10): 180-188. |
| [13] | Zhang Yuxing, Wang Xuejun, Huang Guosheng, Dang Yongfeng, Chen Xinyun. Forest Area Remote Sensing Monitoring Using the Multi-Level Sampling Interpretation Approach [J]. Scientia Silvae Sinicae, 2017, 53(7): 94-104. |
| [14] | Liu Qingwang, Li Shiming, Li Zengyuan, Fu Liyong, Hu Kailong. Review on the Applications of UAV-Based LiDAR and Photogrammetry in Forestry [J]. Scientia Silvae Sinicae, 2017, 53(7): 134-148. |
| [15] | Gao Yue, Qiu Cailou, Wang Guangbiao, Xie Chunxia, Cheng Cong. Flight Parameters of Unmanned Aerial Vehicle(UAV) in Spraying the Insecticide against Hyphantria cunea and the Control Effects [J]. Scientia Silvae Sinicae, 2017, 53(12): 147-152. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||