
Scientia Silvae Sinicae ›› 2026, Vol. 62 ›› Issue (4): 106-117.doi: 10.11707/j.1001-7488.LYKX20250136
• Research papers • Previous Articles Next Articles
Yining Lian1,2,Hao Lu1,2,*( ),Yongjian Huai1,2,*(),Haifeng Xu3,Langning Huo4,Zhichao Wang5
),Yongjian Huai1,2,*(),Haifeng Xu3,Langning Huo4,Zhichao Wang5
Received:2025-03-11
Online:2026-04-15
Published:2026-04-11
Contact:
Hao Lu,Yongjian Huai
E-mail:luhao@bjfu.edu.cn;huaiyj@bjfu.edu.cn
CLC Number:
Yining Lian,Hao Lu,Yongjian Huai,Haifeng Xu,Langning Huo,Zhichao Wang. Point Cloud Semantic-Guided Individual Tree Segmentation and Parameter Estimation Using UAV Laser Scanning[J]. Scientia Silvae Sinicae, 2026, 62(4): 106-117.
Table 1
Basic characteristics of sampling plots with varying structural complexities"
| 样地 Plot | 地形 Terrain | 树种 Tree species | 林分类型 Stand type | 株数密度 Density/ (tree?hm?2) | 点云密度 Point cloud density/ (pts·m?2) | 平均胸径 Average DBH/cm | 平均树高 Average tree height/m | 平均冠幅(南北) Average crown width (N-S)/m |
| 1 | 缓坡 Gentle slope | 桉树 Eucalyptus spp. | 阔叶林 Broad-leaved forest | 650 | 1 242 | 25.1 | 33.7 | 3.2 |
| 2 | 陡坡 Steep slope | 桉树 Eucalyptus spp. | 阔叶林 Broad-leaved forest | 2 100 | 1 040 | 9.79 | 12.1 | 2.2 |
| 3 | 陡坡 Steep slope | 桉树 Eucalyptus spp. | 阔叶林 Broad-leaved forest | 2 867 | 756 | 11.6 | 15.8 | 2.8 |
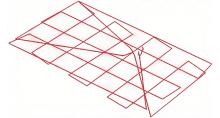
Fig.1
Schematic diagram of UAV flight routes"
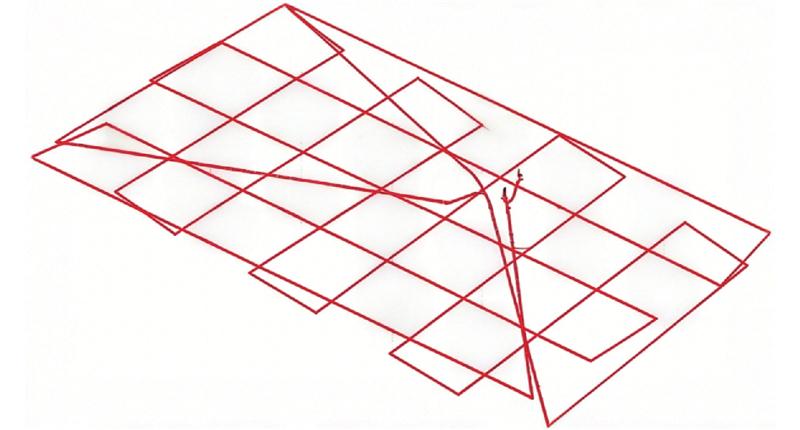
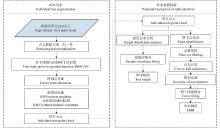
Fig.2
Workflow"
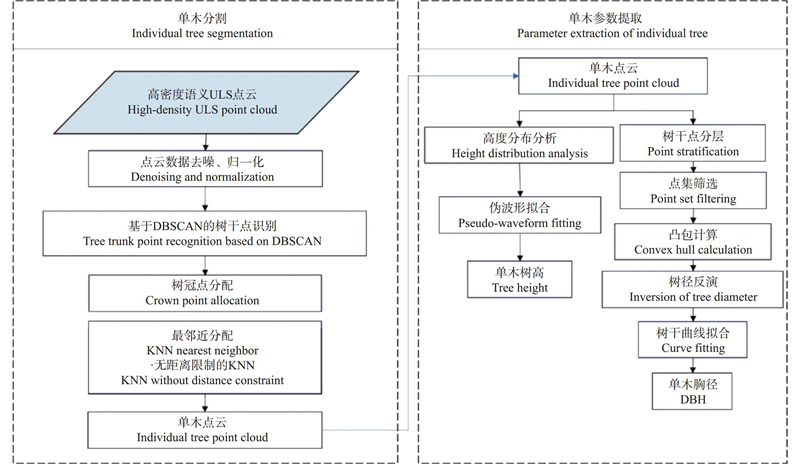

Fig.3
Schematic diagram of individual tree segmentation"
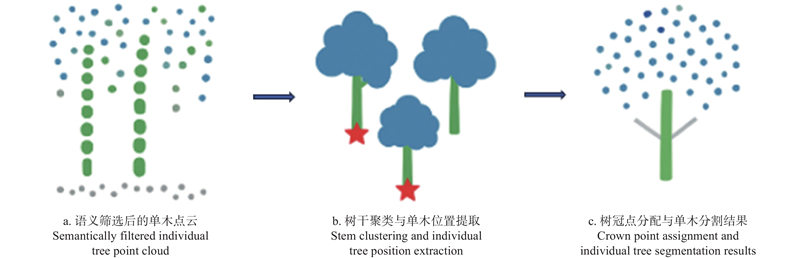
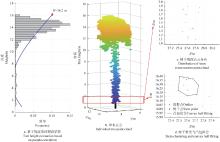
Fig.4
Schematic diagram of individual tree parameter extraction"
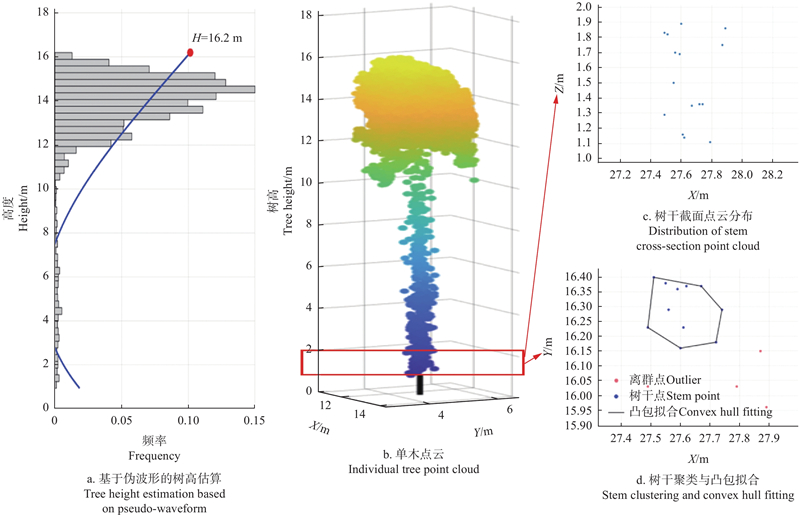

Fig.5
Position matching for semantic-guided individual tree segmentation In the figure, X and Y represent the planar coordinates of the tree positions in the local coordinate system of the sample plot, with units in meters; among them, the green dots represent the tree positions obtained through field investigation, while the blue dots represent the tree positions extracted by the single-tree segmentation algorithm. The length of the red line represents the matching error."
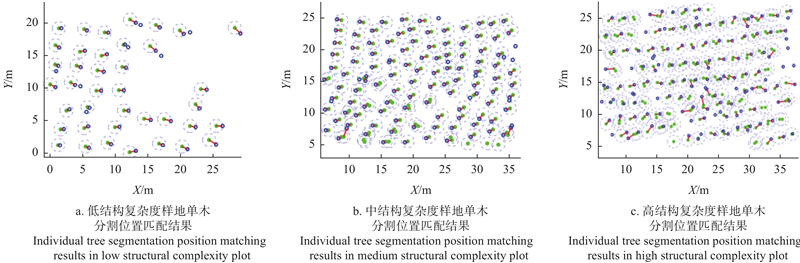
Table 2
Individual tree segmentation accuracy of plots"
| 样地 Plot | 语义引导的单木分割 Semantic-guided individual tree segmentation | 标记控制的分水岭单木分割 Marker-controlled watershed individual tree segmentation | |||||
| 召回率 Recall (Re) | 精确率 Precision (Pr) | F分数 F-score (F) | 召回率 Recall (Re) | 精确率 Precision (Pr) | F分数 F-score (F) | ||
| 1 | 0.97 | 1.00 | 0.98 | 0.67 | 0.15 | 0.25 | |
| 2 | 0.92 | 0.95 | 0.94 | 1.00 | 0.24 | 0.39 | |
| 3 | 0.86 | 0.90 | 0.87 | 0.91 | 0.18 | 0.30 | |

Fig.6
Position matching of individual tree segmentation for marker-controlled watershed In the figure, X and Y represent the planar coordinates of the tree positions in the local coordinate system of the sample plot, with units in meters; among them, the green dots represent the tree positions obtained through field investigation, while the blue dots represent the tree positions extracted by the single-tree segmentation algorithm. The length of the red line represents the matching error."
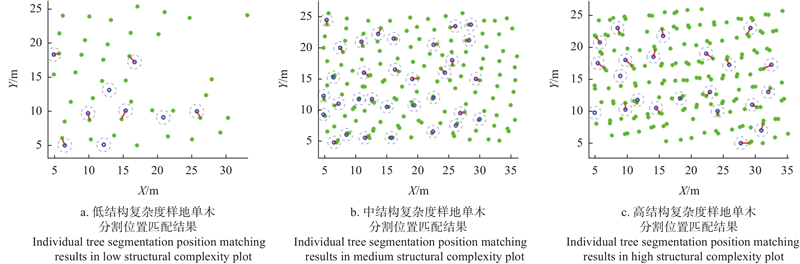
Fig.7
Accuracy comparison between ULS estimated tree height data and TLS estimated tree height"
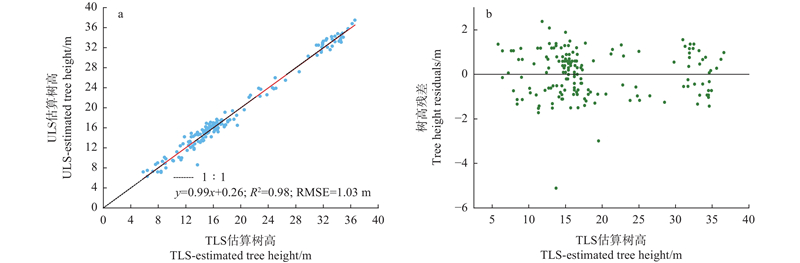
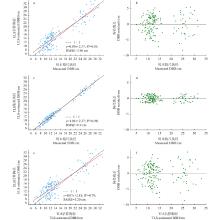
Fig.8
Accuracy comparison of estimated DBH"
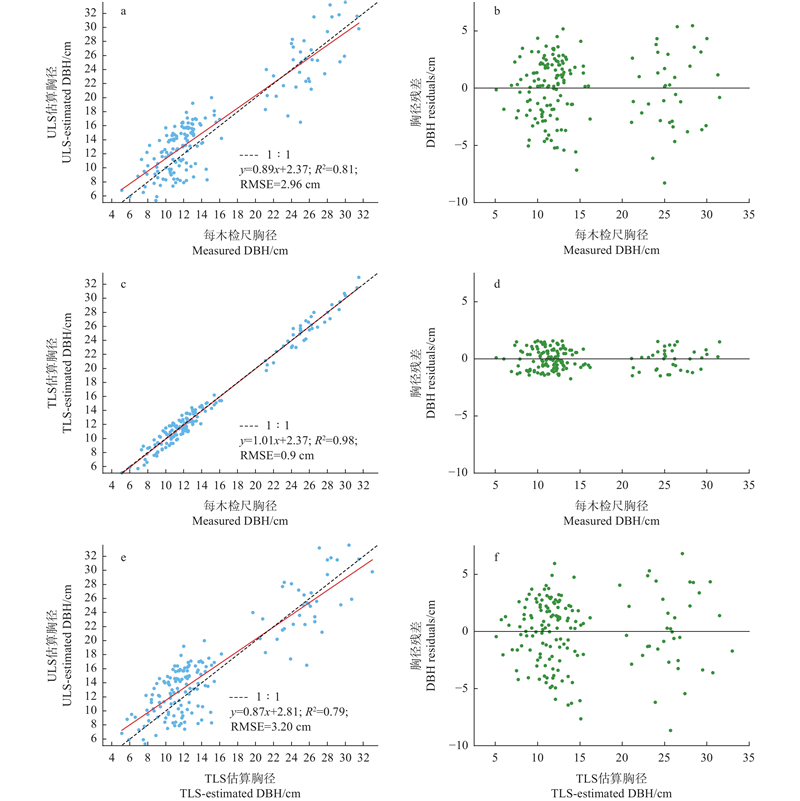
Table 3
DBH accuracy for sample plots based on ULS"
| 组Group | RMSE/cm | RMSE% | Bias/cm | Bias% |
| 无人机?调查 ULS-survey | 2.96 | 20.27 | ?0.86 | ?5.88 |
| 地基?调查 TLS-survey | 0.90 | 6.17 | 0.06 | 0.41 |
| 无人机?地基 ULS-TLS | 3.20 | 22.00 | ?0.92 | ?6.31 |
|
陈思宇, 刘宪钊, 王懿祥, 等. 基于机载LiDAR的高郁闭度华北落叶松林单木识别. 浙江农林大学学报, 2022, 39 (4): 800- 806.
doi: 10.11833/j.issn.2095-0756.20210399 |
|
|
Chen S Y, Liu X Z, Wang Y X, et al. Individual tree detection in the high canopy density Larix principis-rupprechtii forest based on airborne LiDAR. Journal of Zhejiang A& F University, 2022, 39 (4): 800- 806.
doi: 10.11833/j.issn.2095-0756.20210399 |
|
| 丁志文, 邢艳秋, 尹伯卿, 等. 融合无人机和地基激光雷达点云数据估测单木结构参数. 森林工程, 2024, 39 (1): 142- 151. | |
| Ding Z W, Xing Y Q, Yin B Q, et al. Fusion of UAV and TLS LiDAR point cloud data for estimating individual tree structure parameters. Forest Engineering, 2024, 39 (1): 142- 151. | |
|
冯仲科, 杜鹏志, 闫宏伟, 等. 创建新一代森林资源调查监测技术体系的实践与探索. 林草资源研究, 2018, (3): 5- 14.
doi: 10.13466/j.cnki.lyzygl.2018.03.002 |
|
|
Feng Z K, Du P Z, Yan H W, et al. Practice and exploration for establishing new generation technology system of forest resources investigation and monitoring. Forest Resources Management, 2018, (3): 5- 14.
doi: 10.13466/j.cnki.lyzygl.2018.03.002 |
|
| 耿 林, 李明泽, 范文义, 等. 基于机载 LiDAR 的单木结构参数及林分有效冠的提取. 林业科学, 2018, 54 (7): 62- 72. | |
| Geng L, Li M Z, Fan W Y, et al. Individual tree structure parameters and effective crown of the stand extraction base on airborn LiDAR data. Scientia Silvae Sinicae, 2018, 54 (7): 62- 72. | |
|
孔 丹, 庞 勇, 梁晓军, 等. 基于分层叠加的机载LiDAR点云单木分割. 林业科学, 2024, 60 (3): 87- 99.
doi: 10.11707/j.1001-7488.LYKX20220303 |
|
|
Kong D, Pang Y, Liang X J, et al. Individual tree segmentation from ALS point clouds based on layers stacking algorithm. Scientia Silvae Sinicae, 2024, 60 (3): 87- 99.
doi: 10.11707/j.1001-7488.LYKX20220303 |
|
|
李增元, 陈尔学. 中国林业遥感发展历程. 遥感学报, 2021, 25 (1): 292- 301.
doi: 10.11834/jrs.20211016 |
|
|
Li Z Y, Chen E X. Development course of forestry remote sensing in China. National Remote Sensing Bulletin, 2021, 25 (1): 292- 301.
doi: 10.11834/jrs.20211016 |
|
| 李增元, 刘清旺, 庞 勇. 激光雷达森林参数反演研究进展. 遥感学报, 2016, 20 (5): 1138- 1150. | |
| Li Z Y, Liu Q W, Pang Y. Review on forest parameters inversion using LiDAR. Journal of Remote Sensing, 2016, 20 (5): 1138- 1150. | |
| 刘金成, 郭义军, 曾 嘉, 等. 基于树冠最高点和地面树干中心的森林影像点云配准方法. 农业工程学报, 2024, 40 (15): 127- 134. | |
| Liu J C, Guo Y J, Zeng J, et al. Forest point cloud registration using the tree top and the ground-level tree center. Transactions of the Chinese Society of Agricultural Engineering, 2024, 40 (15): 127- 134. | |
|
朱泊东, 罗洪斌, 金 京, 等. 高郁闭度人工林无人机激光雷达单木分割方法优化. 林业科学, 2022, 58 (9): 48- 59.
doi: 10.11707/j.1001-7488.20220905 |
|
|
Zhu B D, Luo H B, Jin J, et al. Optimization of individual tree segmentation methods for high canopy density plantation based on UAV LiDAR. Scientia Silvae Sinicae, 2022, 58 (9): 48- 59.
doi: 10.11707/j.1001-7488.20220905 |
|
| Al-Ali Z M, Abdullah M M, Asadalla N B, et al. 2020. A comparative study of remote sensing classification methods for monitoring and assessing desert vegetation using a UAV-based multispectral sensor. Environmental Monitoring and Assessment, 192 (6): 389. doi: 10.1007/s10661-020-08330-1 | |
|
Brede B, Lau A, Bartholomeus H, et al. Comparing RIEGL RiCOPTER UAV LiDAR derived canopy height and DBH with terrestrial LiDAR. Sensors, 2017, 17 (10): 2371.
doi: 10.3390/s17102371 |
|
|
Calders K, Newnham G, Burt A, et al. Nondestructive estimates of above-ground biomass using terrestrial laser scanning. Methods in Ecology and Evolution, 2015, 6 (2): 198- 208.
doi: 10.1111/2041-210X.12301 |
|
|
Cao L, Liu H, Fu X Y, et al. Comparison of UAV LiDAR and digital aerial photogrammetry point clouds for estimating forest structural attributes in subtropical planted forests. Forests, 2019, 10 (2): 145.
doi: 10.3390/f10020145 |
|
|
Cao Y J, Ball J G C, Coomes D A. et al. Benchmarking airborne laser scanning tree segmentation algorithms in broadleaf forests shows high accuracy only for canopy trees. International Journal of Applied Earth Observation and Geoinformation, 2023, 123, 103490.
doi: 10.1016/j.jag.2023.103490 |
|
|
Chen Q, Baldocchi D, Gong P, et al. Isolating individual trees in a savanna woodland using small footprint LIDAR data. Photogrammetric Engineering & Remote Sensing, 2006, 72 (8): 923- 932.
doi: 10.14358/PERS.72.8.923 |
|
|
Chen Q D, Gao T, Zhu J J, et al. Individual tree segmentation and tree height estimation using leaf-off and leaf-on UAV-LiDAR data in dense deciduous forests. Remote Sensing, 2022, 14 (12): 2787.
doi: 10.3390/rs14122787 |
|
|
Dai W X, Yang B S, Dong Z, et al. A new method for 3D individual tree extraction using multispectral airborne LiDAR point clouds. ISPRS Journal of Photogrammetry and Remote Sensing, 2018, 144 (10): 400- 411.
doi: 10.1016/j.isprsjprs.2018.08.010 |
|
|
Erdody T L, Moskal L M. Fusion of LiDAR and imagery for estimating forest canopy fuels. Remote Sensing of Environment, 2010, 114 (4): 725- 737.
doi: 10.1016/j.rse.2009.11.002 |
|
|
Fu Y W, Niu Y F, Wang L, et al. Individual-tree segmentation from UAV-LiDAR data using a region-growing segmentation and supervoxel-weighted fuzzy clustering approach. Remote Sensing, 2024, 16 (4): 608.
doi: 10.3390/rs16040608 |
|
| Henrich J, Delden J V. 2024,. Towards general deep-learning-based tree instance segmentation models. ICLR 2024 Machine Learning for Remote Sensing Workshop. doi: 10.48550/arXiv.2405.02061 | |
| Hu B X, Li J L, Jing L H, et al. 2014,. Improving the efficiency and accuracy of individual tree crown delineation from high-density LiDAR data. International Journal of Applied Earth Observation and Geoinformation, 26: 145- 155. doi: 10.1016/j.jag.2013.06.003 | |
|
Hyypä E, Kukko A, Kaartinen H, et al. Direct and automatic measurements of stem curve and volume using a high-resolution airborne laser scanning system. Science of Remote Sensing, 2022, 5, 100050.
doi: 10.1016/j.srs.2022.100050 |
|
|
Hyypä J, Yu X W, Hyypä H, et al. Advances in forest inventory using airborne laser scanning. Remote Sensing, 2012, 4 (5): 1190- 1207.
doi: 10.3390/rs4051190 |
|
|
Jaakkola A, Hyyppä J, Yu X W, et al. Autonomous collection of forest field reference: the outlook and a first step with UAV laser scanning. Remote Sensing, 2017, 9 (8): 785.
doi: 10.3390/rs9080785 |
|
|
Jarahizadeh S, Salehi B. Advancing tree detection in forest environments: a deep learning object detector approach with UAV LiDAR data. Urban Forestry & Urban Greening, 2025, 105, 128695.
doi: 10.1016/j.ufug.2025.128695 |
|
|
Liang X L, Kankare V, Hyyppä J, et al. Terrestrial laser scanning in forest inventories. ISPRS Journal of Photogrammetry and Remote Sensing, 2016, 115, 63- 77.
doi: 10.1016/j.isprsjprs.2016.01.006 |
|
|
Lin Y Y, Li H, Jing L H, et al. Individual tree crown delineation using airborne LiDAR data and aerial imagery in the Taiga-tundra ecotone. Remote Sensing, 2024, 16 (21): 3920.
doi: 10.3390/rs16213920 |
|
|
Lu H, Li B W, Yang G, et al. Towards a point cloud understanding framework for forest scene semantic segmentation across forest types and sensor platforms. Remote Sensing of Environment, 2025, 318, 114591.
doi: 10.1016/j.rse.2024.114591 |
|
|
Muss J D, Mladenoff D J, Townsend P A. A pseudo-waveform technique to assess forest structure using discrete LiDAR data. Remote Sensing of Environment, 2011, 115 (3): 824- 835.
doi: 10.1016/j.rse.2010.11.008 |
|
|
Ni W J, Ranson K J, Zhang Z Y, et al. Features of point clouds synthesized from multi-view ALOS/PRISM data and comparisons with LiDAR data in forested areas. Remote Sensing of Environment, 2014, 149, 47- 57.
doi: 10.1016/j.rse.2014.04.001 |
|
|
Pu Y H, Xu D D, Wang H B, et al. A new strategy for individual tree detection and segmentation from leaf-on and leaf-off UAV-LiDAR point clouds based on automatic detection of seed points. Remote Sensing, 2023, 15 (6): 1619.
doi: 10.3390/rs15061619 |
|
|
Qin H M, Zhou W Q, Yao Y, et al. Individual tree segmentation and tree species classification in subtropical broadleaf forests using UAV-based LiDAR, hyperspectral, and ultrahigh-resolution RGB data. Remote Sensing of Environment, 2022a, 280, 113143.
doi: 10.1016/j.rse.2022.113143 |
|
|
Wieser M, Mandlburger G, Hollaus M, et al. A case study of UAS borne laser scanning for measurement of tree stem diameter. Remote Sensing, 2017, 9 (11): 1154.
doi: 10.3390/rs9111154 |
|
|
Wielgosz M, Puliti S, Xiang B B, et al. SegmentAnyTree: a sensor and platform agnostic deep learning model for tree segmentation using laser scanning data. Remote Sensing of Environment, 2024, 313, 114367.
doi: 10.1016/j.rse.2024.114367 |
|
|
Wu X Q, Shen X, Cao L, et al. Assessment of individual tree detection and canopy cover estimation using unmanned aerial vehicle based light detection and ranging (UAV-LiDAR) data in planted forests. Remote Sensing, 2019, 11 (8): 908.
doi: 10.3390/rs11080908 |
|
|
Xiang B B, Wielgosz M, Kontogianni T, et al. Automated forest inventory: analysis of high-density airborne LiDAR point clouds with 3D deep learning. Remote Sensing of Environment, 2024, 305, 114078.
doi: 10.1016/j.rse.2024.114078 |
|
|
Zhang Z N, Wang T J, Skidmore A K, et al. An improved area-based approach for estimating plot-level tree DBH from airborne LiDAR data. Forest Ecosystems, 2023, 10, 100089.
doi: 10.1016/j.fecs.2023.100089 |
| [1] | Guangpeng Fan,Liangliang Xu,Huide Cai,Zhanyong Xu,Xiang Meng,Yakui Shao,Feng Lu. Extraction of Individual Eucalyptus Tree Parameters and Determination of Aboveground Carbon Stock Based on Terrestrial LiDAR Point Clouds [J]. Scientia Silvae Sinicae, 2026, 62(3): 88-99. |
| [2] | Zhongyang Hu,Liang Shan,Xiangyu Chen,Kunyong Yu,Jian Liu. Individual Tree Segmentation of UAV-LiDAR Based on the Combination of CHM and DSM [J]. Scientia Silvae Sinicae, 2024, 60(8): 14-24. |
| [3] | Bodong Zhu,Hongbin Luo,Jing Jin,Cairong Yue. Optimization of Individual Tree Segmentation Methods for High Canopy Density Plantation Based on UAV LiDAR [J]. Scientia Silvae Sinicae, 2022, 58(9): 48-59. |
| [4] | Hongyu Huang,Yubo Luo,Liyu Tang,Xiaoxiao Li,Wei Peng,Chongcheng Chen. Registration of Point Cloud from Different Platforms in Forested Area Based on Tree Position Features [J]. Scientia Silvae Sinicae, 2022, 58(11): 96-107. |
| [5] | Dongbo Xie,Yakai Lei,Yuchao Zhang,Qingwang Liu,Liyong Fu,Qiao Chen. Estimation of Canopy Cover in the Core Area of Winter Olympic Games Based on Airborne LiDAR Data [J]. Scientia Silvae Sinicae, 2022, 58(10): 24-34. |
| [6] | Langning Huo,Xiaoli Zhang. Individual Tree Information Extraction and Accuracy Evaluation Based on Airborne LiDAR Point Cloud by Multilayer Clustering Method [J]. Scientia Silvae Sinicae, 2021, 57(1): 85-94. |
| [7] | Li Pinghao, Shen Xin, Dai Jinsong, Cao Lin. Comparisons and Accuracy Assessments of LiDAR-Based Tree Segmentation Approaches in Planted Forests [J]. Scientia Silvae Sinicae, 2018, 54(12): 127-136. |
| [8] | Liu Qingwang, Li Shiming, Li Zengyuan, Fu Liyong, Hu Kailong. Review on the Applications of UAV-Based LiDAR and Photogrammetry in Forestry [J]. Scientia Silvae Sinicae, 2017, 53(7): 134-148. |
| [9] | Duan Zhugeng, Xiao Huashun, Yuan Weixiang. Comparison of Interpolation Methods of Forest Canopy Height Model Using Discrete Point Cloud Data [J]. Scientia Silvae Sinicae, 2016, 52(9): 86-94. |
| [10] | You Lei, Tang Shouzheng, Song Xinyu. An Algorithm of Stem Surface Reconstruction Based on Tangent Plane Projection [J]. Scientia Silvae Sinicae, 2016, 52(11): 115-123. |
| [11] | Huang Hongyu;Chen Chongcheng;Zou Jie;Lin Ding. Tree Geometrical 3 D Modeling from Terrestrial Laser Scanned Point Clouds: A Review [J]. Scientia Silvae Sinicae, 2013, 49(4): 123-130. |
| [12] | Guo Xiurong;Lu Huaimin;Du Danfeng. Automatic Measurement Technology for Standing Tree Volume Based on Laser Scanner [J]. Scientia Silvae Sinicae, 2008, 44(9): 72-75. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||