
Scientia Silvae Sinicae ›› 2022, Vol. 58 ›› Issue (12): 62-74.doi: 10.11707/j.1001-7488.20221207
Previous Articles Next Articles
Jiuqing Liu1,Binhai Zhu1,Chunmei Yang1,*,Hang Yu2
Received:2021-12-29
Online:2022-12-25
Published:2023-03-11
Contact:
Chunmei Yang
CLC Number:
Jiuqing Liu,Binhai Zhu,Chunmei Yang,Hang Yu. Dynamic Performance Analysis and Experimental Investigation of Hole Digging Mechanism of Tree Planting Machine[J]. Scientia Silvae Sinicae, 2022, 58(12): 62-74.

Fig.1
Structure of tree planting machine"
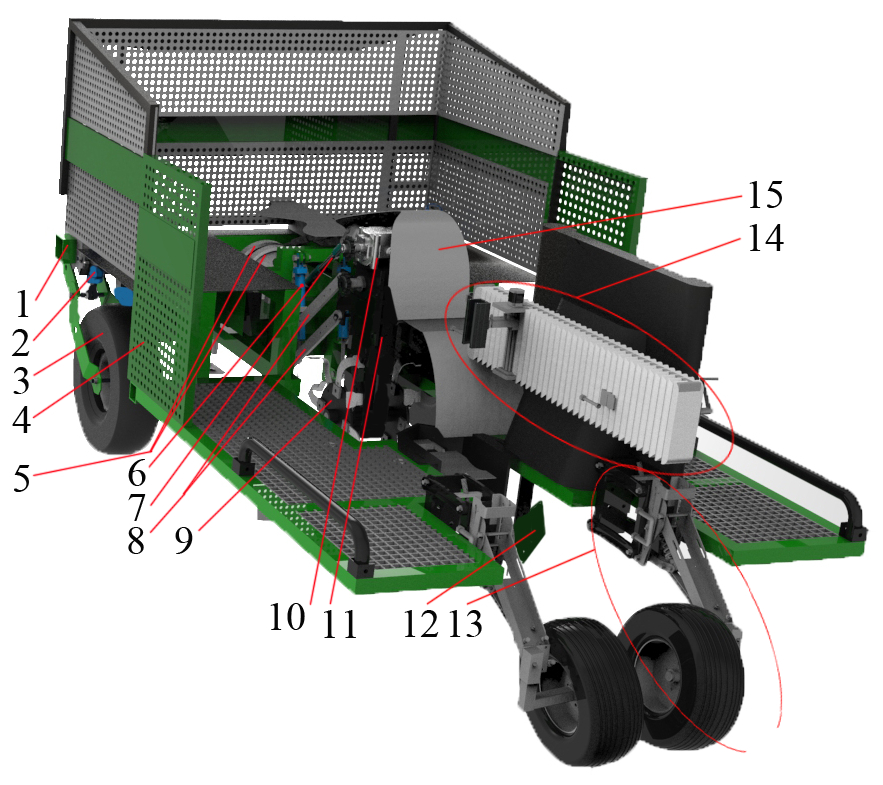
Fig.2
Schematic diagram of intermittent digging mechanism"
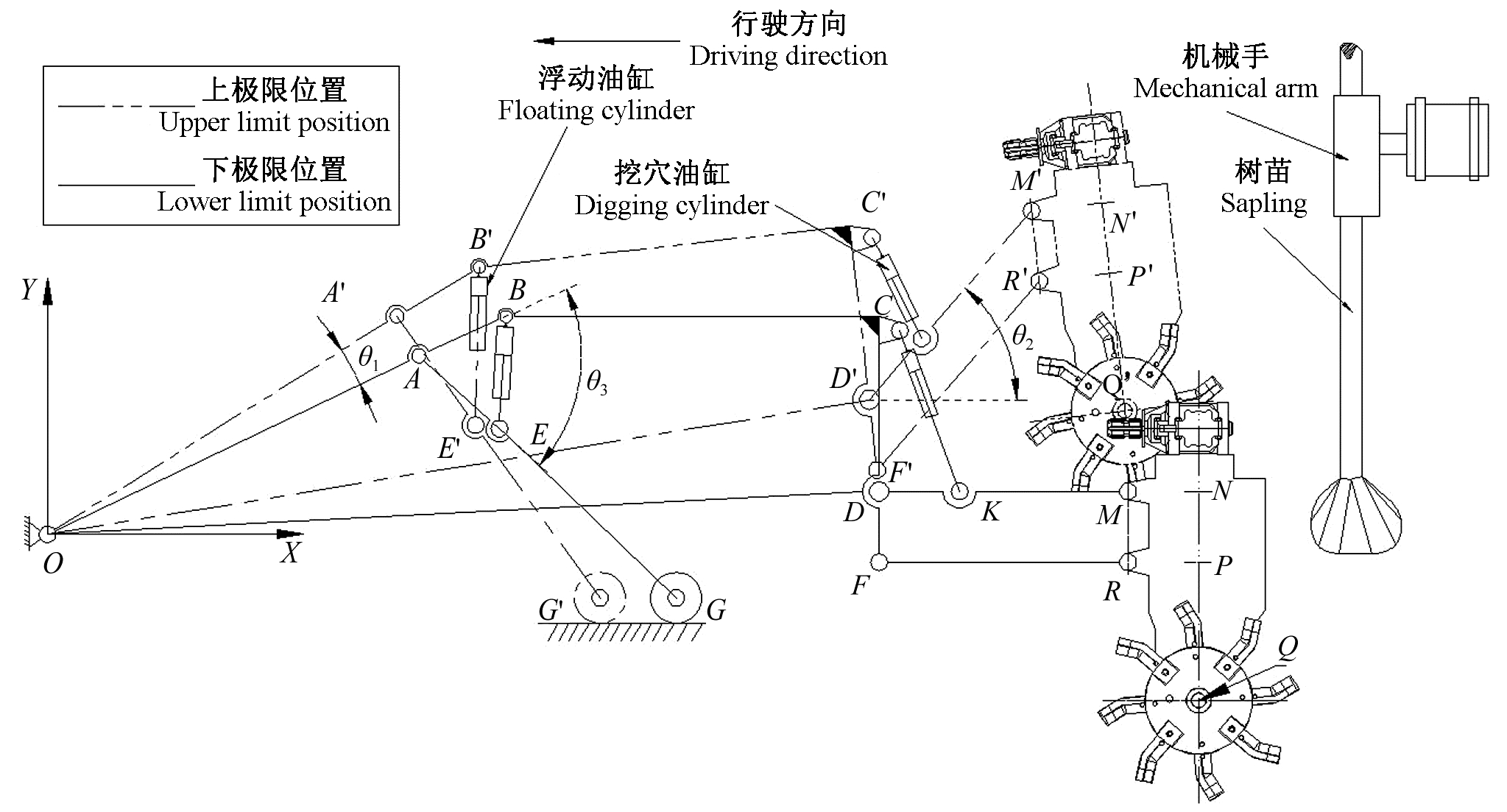

Fig.3
Virtual prototype of tree planting machine"
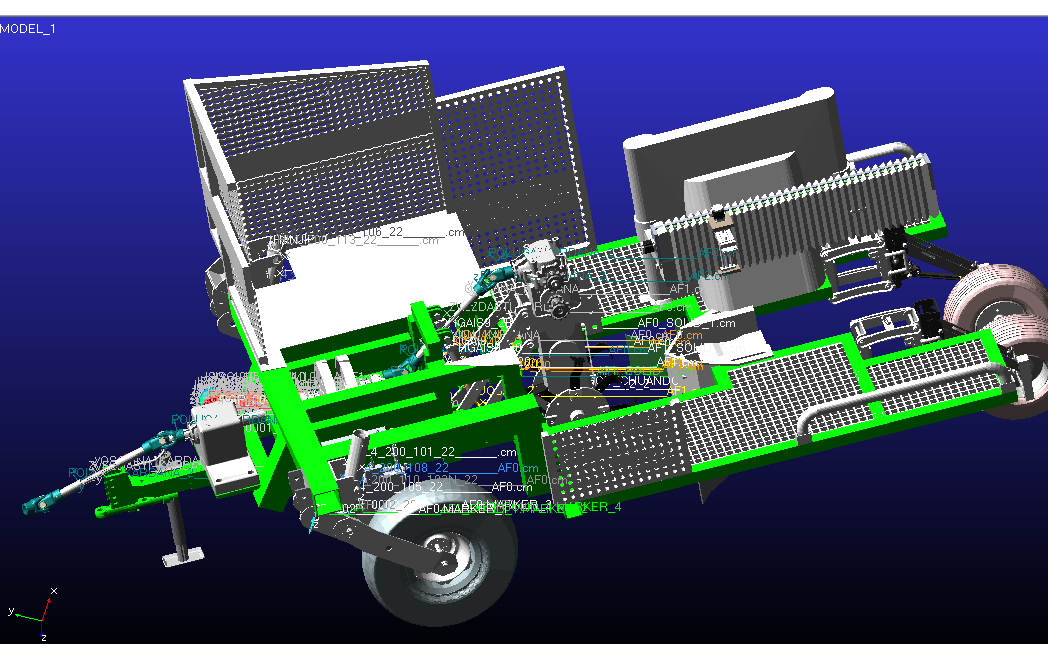
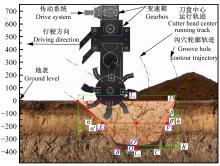
Fig.4
Schematic diagram of hole shape parameter"
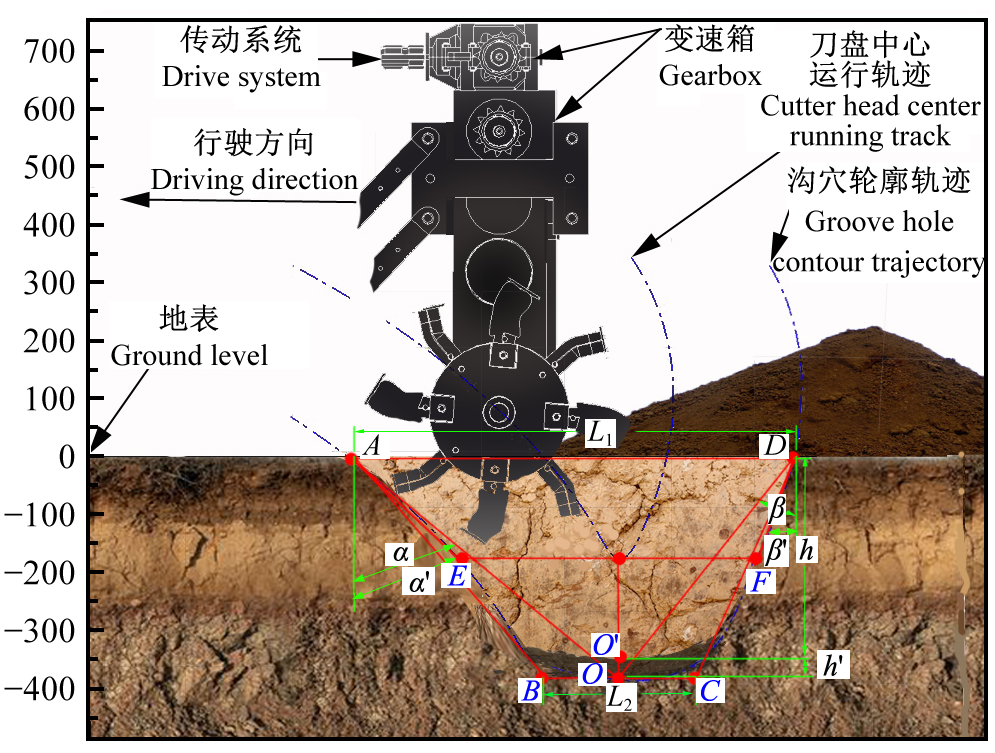
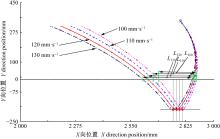
Fig.5
Movement track of cutter head center(v1=100, 110, 120, 130 mm·s-1)"
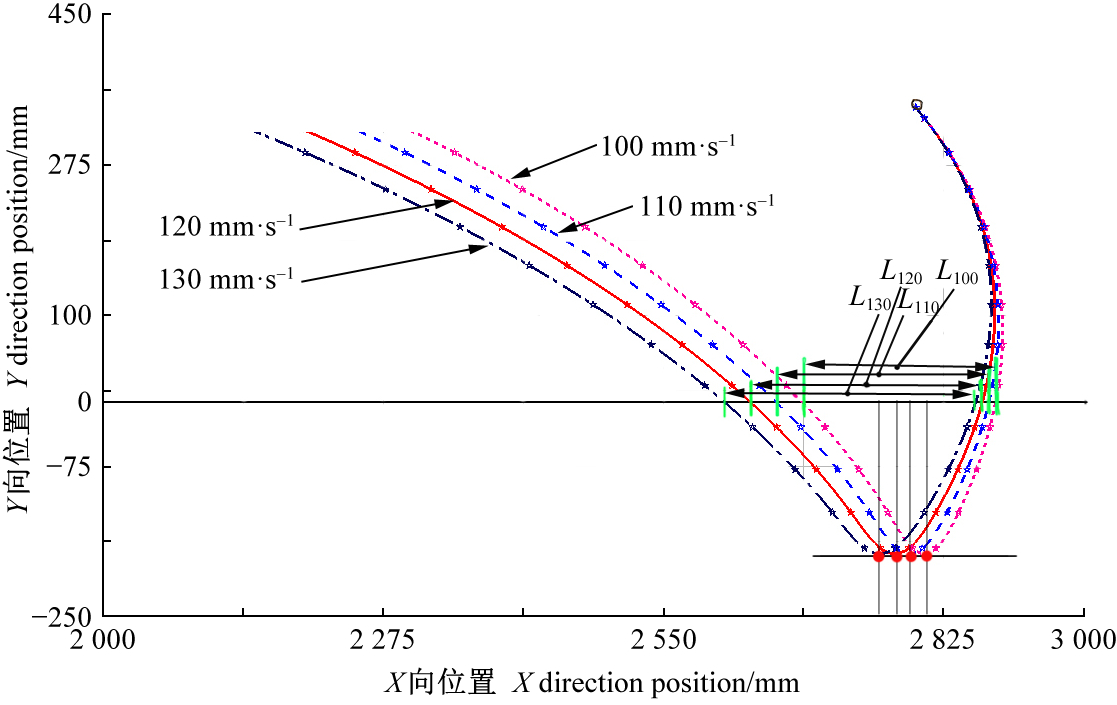
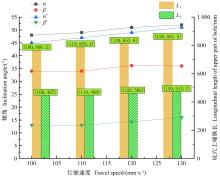
Fig.6
Effect of driving speed on hole shape"
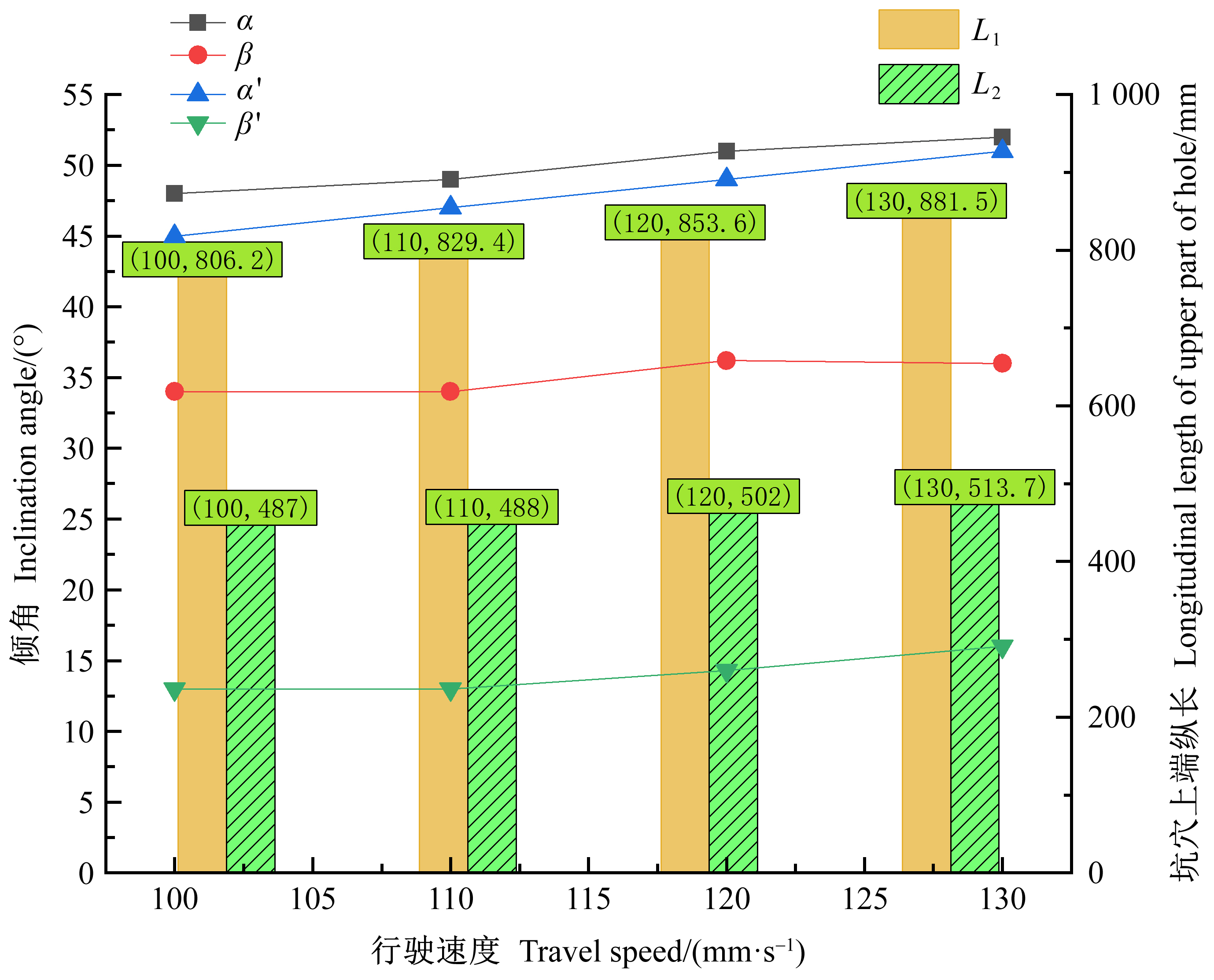

Fig.7
Movement track of cutter head center(v2=10, 15, 20, 25 mm·s-1)"

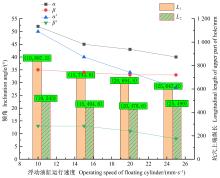
Fig.8
Effect of floating cylinder speed on hole shape"

Fig.9
Movement track of cutter head center(v3=65, 70, 75, 80 mm·s-1)"

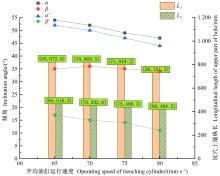
Fig.10
Effect of digging cylinder speed on hole shape"


Fig.11
Kinematics simulation curve in X direction of cutter head center"
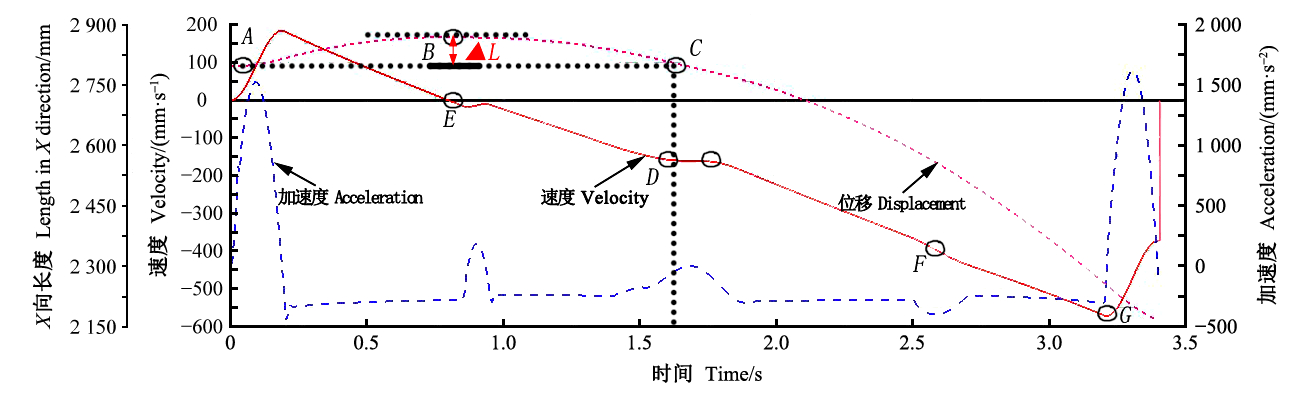

Fig.12
Kinematics simulation curve in Y direction of cutter head center"
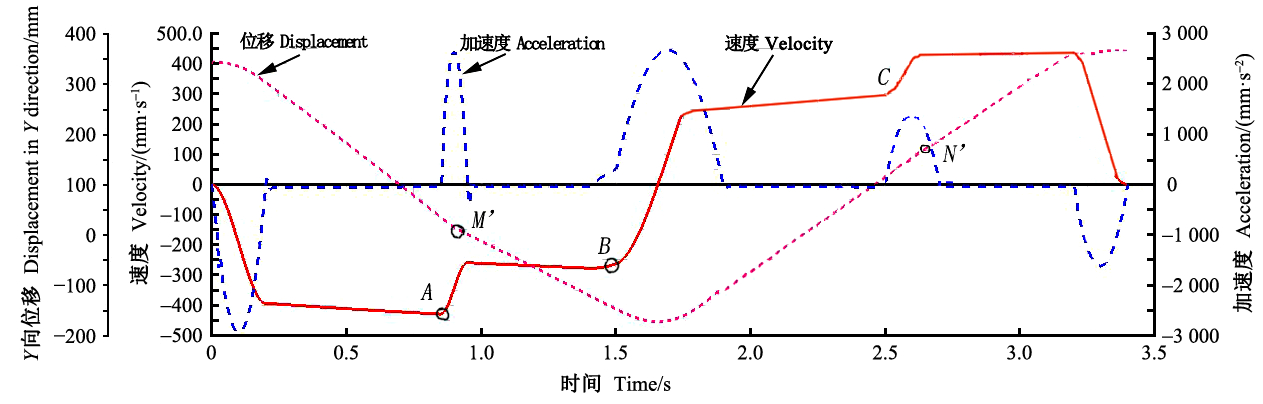

Fig.13
High speed photography analysis results"
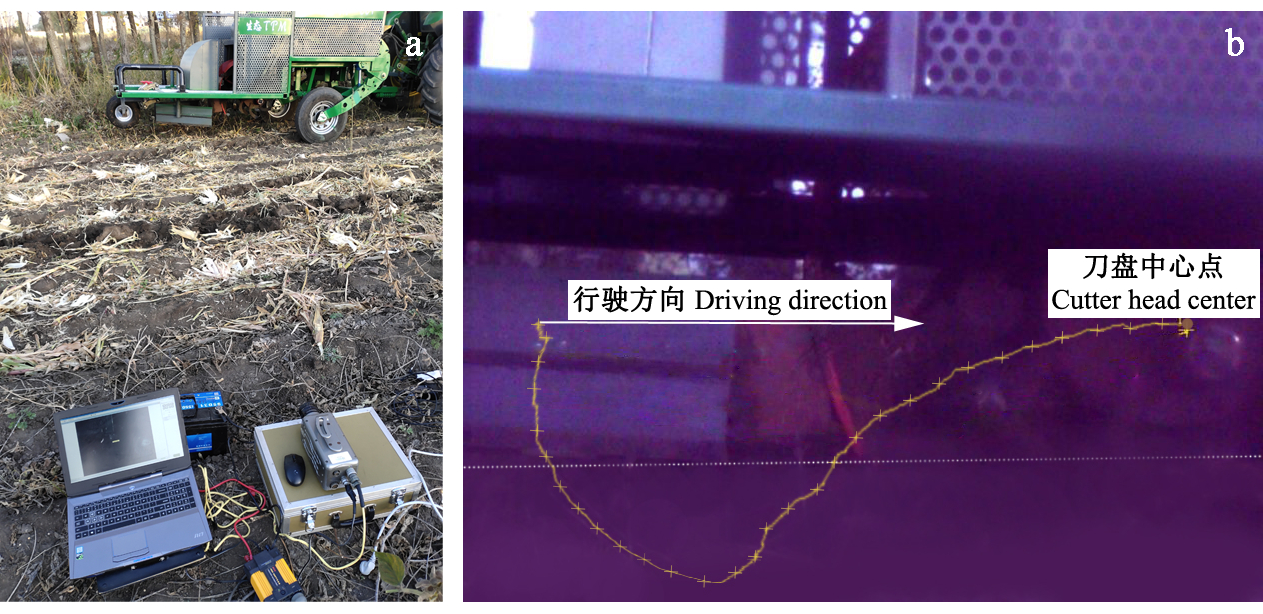
Table 1
Test factors and levels"
| 编码 Code | 行驶速度 Driving speed (A)/ (mm·s-1) | 浮动油缸运行速度 Floating cylinder speed(B)/ (mm·s-1) | 挖穴油缸运行速度 Digging cylinder speed(C)/ (mm·s-1) |
| -1 | 100.00 | 10.00 | 65.00 |
| 0 | 115.00 | 17.50 | 72.50 |
| 1 | 130.00 | 25.00 | 80.00 |
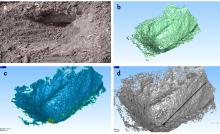
Fig.14
3D contour measurement process of hole"

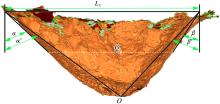
Fig.15
3D shape of hole"

Table 2
Test scheme and results"
| 序号 No. | A | B | C | L1/ mm | α′/ (°) | β′/ (°) |
| 1 | 0 | 0 | 0 | 779 | 37.5 | 26.7 |
| 2 | 1 | 1 | 0 | 719 | 33.8 | 25.6 |
| 3 | 0 | 0 | 0 | 776 | 37.4 | 26.6 |
| 4 | 0 | 1 | 1 | 632 | 29.4 | 24.5 |
| 5 | 0 | -1 | -1 | 882 | 44.2 | 28.6 |
| 6 | -1 | 0 | 1 | 701 | 33.5 | 25.3 |
| 7 | 0 | 0 | 0 | 765 | 37.2 | 26.1 |
| 8 | 0 | 0 | 0 | 773 | 37.0 | 26.3 |
| 9 | 0 | 1 | -1 | 695 | 32.2 | 25.1 |
| 10 | -1 | -1 | 0 | 805 | 38.1 | 27.4 |
| 11 | 0 | -1 | 1 | 731 | 35.1 | 25.9 |
| 12 | -1 | 1 | 0 | 651 | 29.8 | 24.6 |
| 13 | 0 | 0 | 0 | 761 | 36.8 | 26.0 |
| 14 | -1 | 0 | -1 | 783 | 37.8 | 26.9 |
| 15 | 1 | -1 | 0 | 903 | 45.5 | 29.2 |
| 16 | 1 | 0 | 1 | 751 | 36.1 | 26.2 |
| 17 | 1 | 0 | -1 | 899 | 44.8 | 28.9 |
Table 3
Variance analysis of regression model of L1"
| 来源 Source | 平方和 Sum of squares | 自由度 df | 均方 Mean square | F | P |
| 模型Model | 95 803 | 9 | 10 645 | 124.66 | < 0.000 1 |
| A-A | 13 819 | 1 | 13 820 | 161.84 | < 0.000 1 |
| B-B | 48 765 | 1 | 48 766 | 571.10 | < 0.000 1 |
| C-C | 24 675 | 1 | 24 675 | 288.97 | < 0.000 1 |
| AB | 242 | 1 | 242 | 2.83 | 0.136 3 |
| AC | 1 142 | 1 | 1 142 | 13.38 | 0.008 1 |
| BC | 1 888 | 1 | 1 888 | 22.11 | 0.002 2 |
| A2 | 2 379 | 1 | 2 379 | 27.86 | 0.001 2 |
| B2 | 2 643 | 1 | 2 643 | 30.95 | 0.000 8 |
| C2 | 489 | 1 | 489 | 5.73 | 0.047 9 |
| 残差Residual | 598 | 7 | 86 | ||
| 失拟项Lack of fit | 373 | 3 | 124 | 2.21 | 0.229 7 |
| 纯误差Pure error | 225 | 4 | 56 | ||
| 总和Cor total | 96 401 | 16 |
Table 4
Variance analysis of regression model of α′"
| 来源 Source | 平方和 Sum of squares | 自由度 df | 均方 Mean square | F | P |
| 模型Model | 344.81 | 9 | 38.310 | 173.53 | < 0.000 1 |
| A-A | 55.13 | 1 | 55.130 | 249.68 | < 0.000 1 |
| B-B | 177.66 | 1 | 177.660 | 804.68 | < 0.000 1 |
| C-C | 77.50 | 1 | 77.500 | 351.02 | < 0.000 1 |
| AB | 2.89 | 1 | 2.890 | 13.09 | 0.008 5 |
| AC | 4.84 | 1 | 4.840 | 21.92 | 0.002 3 |
| BC | 9.92 | 1 | 9.920 | 44.94 | 0.000 3 |
| A2 | 6.29 | 1 | 6.290 | 28.50 | 0.001 1 |
| B2 | 10.81 | 1 | 10.810 | 48.97 | 0.000 2 |
| C2 | 0.52 | 1 | 0.520 | 2.37 | 0.167 6 |
| 残差Residual | 1.55 | 7 | 0.220 | ||
| 失拟项Lack of fit | 1.22 | 3 | 0.410 | 4.95 | 0.078 2 |
| 纯误差Pure error | 0.33 | 4 | 0.082 | ||
| 总和Cor total | 346.36 | 16 |
Table 5
Variance analysis of regression model of β′"
| 来源 Source | 平方和 Sum of squares | 自由度 df | 均方 Mean square | F | P |
| 模型Model | 30.400 | 9 | 3.380 | 30.33 | < 0.000 1 |
| A-A | 4.060 | 1 | 4.060 | 36.47 | 0.000 5 |
| B-B | 15.960 | 1 | 15.960 | 143.33 | < 0.000 1 |
| C-C | 7.220 | 1 | 7.220 | 64.84 | < 0.000 1 |
| AB | 0.160 | 1 | 0.160 | 1.44 | 0.269 7 |
| AC | 0.300 | 1 | 0.300 | 2.72 | 0.143 3 |
| BC | 1.100 | 1 | 1.100 | 9.90 | 0.016 2 |
| A2 | 1.420 | 1 | 1.420 | 12.72 | 0.009 1 |
| B2 | 0.200 | 1 | 0.200 | 1.83 | 0.218 2 |
| C2 | 0.038 | 1 | 0.038 | 0.34 | 0.577 4 |
| 残差Residual | 0.780 | 7 | 0.110 | ||
| 失拟项Lack of fit | 0.410 | 3 | 0.140 | 1.46 | 0.351 4 |
| 纯误差Pure error | 0.370 | 4 | 0.093 | ||
| 总和Cor total | 31.180 | 16 |

Fig.16
Influence of interactive factors on the longitudinal length of hole"

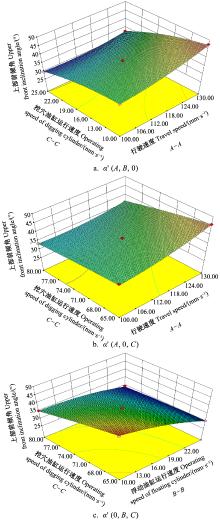
Fig.17
Influence of interaction factors on the rake angle of hole"

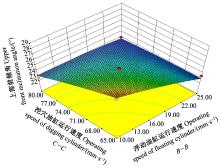
Fig.18
Influence of interaction factors on the caster angle of hole"

| 陈卫洪, 王晓伟. 西部地区森林碳汇供给可持续发展机制研究. 林业经济, 2019, 41 (3): 79- 86. | |
| Chen W H , Wang X W . Study on the mechanism of sustainable development of forest carbon sink supply in western China. Forestry Economics, 2019, 41 (3): 79- 86. | |
| 侯荣国, 王湘田, 卢萍, 等. 全流程一体化植树工程车及其关键部件设计. 机械设计与制造, 2021, (10): 62- 65. | |
| Hou R G , Wang X T , Lu P , et al. Design of the whole process integrated tree planting engineering vehicle and its key parts. Machinery Design & Manufacture, 2021, (10): 62- 65. | |
| 贾洪雷, 陈忠亮, 马成林, 等. 北方旱作农业区耕作体系关键技术. 农业机械学报, 2008, 39 (11): 59- 63. | |
| Jia H L , Chen Z L , Ma C L , et al. Key technologies for the tillage system in area of dry farming of Northern China. Transactions of the Chinese Society for Agricultural Machinery, 2008, 39 (11): 59- 63. | |
| 姜晨龙. 2013. 高效深栽造林钻孔机的研制与试验. 北京: 北京林业大学. | |
| Jiang C L. 2013. Development and experiment of efficient deep planting earth auger. Beijing: Beijing Forestry University. [in Chinese] | |
| 李波, 陆建兰, 黄利强, 等. 一种平面天线可折叠变胞机构的设计分析研究. 西北工业大学学报, 2018, 36 (S1): 33- 40. | |
| Li B , Lu J L , Huang L Q , et al. Design and analysis of a foldable metamorphic mechanism with flat panel antennas. Journal of Northwestern Polytechnical University, 2018, 36 (S1): 33- 40. | |
| 李春高. 我国造林机械的现状及发展趋势. 林业机械与木工设备, 2012, 40 (10): 4- 6.4-6, 10 | |
| Li C G . Status and development trend of China's afforestation machinery. Forestry Machinery & Woodworking Equipment, 2012, 40 (10): 4- 6.4-6, 10 | |
| 李连江. 2005. 平面连杆机构的计算机辅助分析与仿真. 天津: 天津工业大学. | |
| Li L J. 2005. Computer aided analysis and simulation of planar linkage mechanism. Tianjin: Tianjin Polytechnic University. [in Chinese] | |
| 刘大为, 谢方平, 叶强, 等. 1K-50型果园开沟机开沟部件功耗影响因素分析与试验. 农业工程学报, 2019, 35 (18): 19- 28. | |
| Liu D W , Xie F P , Ye Q , et al. Analysis and experiment on influencing factors on power of ditching parts for 1K-50 orchard ditching. Transactions of the Chinese Society of Agricultural Engineering, 2019, 35 (18): 19- 28. | |
| 蒙贺伟, 李进江, 坎杂, 等. ZS-45多功能植树机的研制. 农机化研究, 2013, 35 (1): 83- 85. | |
| Meng H W , Li J J , Kan Z , et al. Development of ZS-45 multi-function planting trees machine. Journal of Agricultural Mechanization Research, 2013, 35 (1): 83- 85. | |
| 彭强吉, 康建明, 荐世春, 等. 圆盘式开沟机正反转开沟运动学分析及参数优化. 中国农业大学学报, 2018, 23 (8): 151- 159. | |
| Peng Q J , Kang J M , Jian S C , et al. Parameter optimization and power consumption and kinematics analyses of clockwise and counterclockwise ditching. Journal of China Agricultural University, 2018, 23 (8): 151- 159. | |
| 秦宽, 丁为民, 方志超, 等. 收获开沟埋草一体机双圆盘开沟机构设计与参数优化. 农业工程学报, 2017, 33 (18): 27- 35. | |
| Qin K , Ding W M , Fang Z C , et al. Design and parameter optimization of double disk opener mechanism for harvest ditch and stalk-disposing machine. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33 (18): 27- 35. | |
| 宋代平. 2004. 生态植树机动态性能的理论研究. 哈尔滨: 东北林业大学. | |
| Song D P. 2004. Theoretical study on dynamic characteristic of ecoplanter. Harbin: Northeast Forestry University. [in Chinese] | |
| 铁铮, 吴曙红. 碳达峰和碳中和: 林业发展迎来新机遇. 国土绿化, 2021, (5): 37- 39. | |
| Tie Z , Wu S H . Carbon peaking and carbon neutrality: new opportunities for forestry development. Land Greening, 2021, (5): 37- 39. | |
| 吴立波. 线性直角运动机器人结构分析及优化. 现代制造工程, 2021, (9): 24- 27.24-27, 32 | |
| Wu L B . Structure analysis and optimization of linear right angle motion robot. Modern Manufacturing Engineering, 2021, (9): 24- 27. | |
| 杨德福. 一种沙区水冲深栽插干造林技术. 青海农林科技, 2019, (1): 81- 83. | |
| Yang D F . A pressurized water jetting tree deep planting technology in desertification and sandy area. Science and Technology of Qinghai Agriculture and Forestry, 2019, (1): 81- 83. | |
| 张媛媛. 2018. 温室秸秆反应堆自走式开沟机设计与性能分析. 秦皇岛: 河北科技师范学院. | |
| Zhang Y Y. 2018. Design and performance analysis of self-propelled trencher for greenhouse straw reactor. Qinhuangdao: Hebei Normal University of Science & Technology. [in Chinese] | |
| 郑慧珍, 王杰, 王滔. 平行四边形式收砟机构设计与分析. 机械, 2020, 47 (6): 68- 73. | |
| Zheng H Z , Wang J , Wang T . Design and analysis of parallelogram ballast recollecting mechanism. Machinery, 2020, 47 (6): 68- 73. | |
| 周克媛, 彭善飞, 韩远飞. 自动植树机开沟器结构设计及分析. 北京工业职业技术学院学报, 2017, 16 (1): 10- 12. | |
| Zhou K Y , Peng S F , Han Y F . Design and analysis of machine structure of automatic planting furrow opener. Journal of Beijing Polytechnic College, 2017, 16 (1): 10- 12. | |
| Ersson B , Laine T , Saksa T . Mechanized tree planting in Sweden and Finland: current state and key factors for future growth. Forests, 2018, 9 (7): 370. | |
| Graves L R , Choi H , Zhao W C , et al. Model-free deflectometry for freeform optics measurement using an iterative reconstruction technique. Optics Letters, 2018, 43 (9): 2110- 2113. | |
| Jensen T , Keddy T , Sidders D . Economic impacts of short rotation woody crops in Canada. The Forestry Chronicle, 2021, 97 (3): 266- 270. | |
| Laine T , Rantala J . Mechanized tree planting with an excavator-mounted M-Planter planting device. International Journal of Forest Engineering, 2013, 24 (3): 183- 193. | |
| Marinov A K , Yordanova V . Technological research of mechanized site preparation for afforestation of forest lands. Innovation in Woodworking Industry and Engineering Design, 2017, (2): 31- 39. | |
| Nurunnabi A , Belton D , West G . Robust statistical approaches for local planar surface fitting in 3D laser scanning data. ISPRS Journal of Photogrammetry and Remote Sensing, 2014, 96, 106- 122. | |
| Sansoni G , Docchio F . Three-dimensional optical measurements and reverse engineering for automotive applications. Robotics and Computer-Integrated Manufacturing, 2004, 20 (5): 359- 367. |
| [1] | Huang Chengbiao;Cao Jizhao;Wu Qingbiao;Wei Jiaguo;Meng Yuehuan;Li Baoping. Comparative Analysis on Soil Physi-Chemical Properties and the Tree Growth in Taiwania flousiana Plantations and Successive Rotation Plantations of Cunninghamia lanceolata [J]. Scientia Silvae Sinicae, 2010, 46(4): 1-7. |
| [2] | Liu Yong;Liang Xiaosong;Dai Huaguo;Shi Xiaofang;Zhuang Yonglin;Chen Xudong. Study on Applying Semiochemicals of Bark Beetle in Timber Quarantine [J]. Scientia Silvae Sinicae, 2006, 42(8): 135-138. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||