
林业科学 ›› 2025, Vol. 61 ›› Issue (8): 11-24.doi: 10.11707/j.1001-7488.LYKX20240430
茹煜1,2,*( ),徐国鹏1,范高鸣1,李秋洁1,易永魁1,丁莉1,周宏平1,2
),徐国鹏1,范高鸣1,李秋洁1,易永魁1,丁莉1,周宏平1,2
收稿日期:2024-07-11
出版日期:2025-08-25
发布日期:2025-09-02
通讯作者:
茹煜
E-mail:superchry@163.com
基金资助:
Yu Ru1,2,*(),Guopeng Xu1,Gaoming Fan1,Qiujie Li1,Yongkui Yi1,Li Ding1,Hongping Zhou1,2
Received:2024-07-11
Online:2025-08-25
Published:2025-09-02
Contact:
Yu Ru
E-mail:superchry@163.com
摘要:
目的: 为解决传统核桃人工采收方式存在的采收难度大、效率低、成本高等问题,根据我国核桃种植区域向标准化果园发展的趋势,设计基于可编程逻辑控制器(PLC)的核桃振动采收控制系统,并通过仿真试验验证该系统的可行性,以提高核桃振动采收自动化水平,降低人工采收难度,提高采收效率。方法: 基于激光雷达采集树干点云,在Visual Studio 2017环境下对数据进行预处理,分割出最佳点云强度处的树干信息,采用最小二乘圆拟合方法提取树干直径;应用MATLAB软件设计模糊PID控制器,利用Simulink搭建系统框图找出控制器的最优参数,提高核桃振动采收控制系统的可行性;运用TIA Portal软件设计PLC程序,实现振动臂伸缩功能、夹持功能以及振动功能;使用组态王软件设计人机界面,通过以太网实现PLC与人机界面通讯,实现系统运行后的实时监控;通过仿真和实物试验对核桃振动采收控制系统的可行性进行验证。结果: 应用MATLAB软件得出控制器的最优参数分别为Kp=7.682、Ki=5.675、Kd=1.675。不同移动距离、树干直径的夹持力和振动频率仿真验证结果显示,在伸缩距离为20~100 cm时,误差为0.02%~0.15%;树干直径为15~20 cm时,夹持力误差稳定在1.20%~2.72%;振动频率误差为0.67%~3.00%。通过实机采收验证,控制系统能够准确控制振动臂进行移动、夹持和振动,采净率均在81%以上,且采收效率达到人工采收的7倍以上。结论: 本研究提出并设计一款基于PLC的核桃振动采收控制系统,通过仿真试验验证了系统的可行性。该振动采收控制系统适用于标准果园内的核桃采收,为核桃振动采收智能化提供了科学依据和实际指导,有效提高了核桃采收效率。
中图分类号:
茹煜,徐国鹏,范高鸣,李秋洁,易永魁,丁莉,周宏平. 基于可编程逻辑控制器的核桃振动采收控制系统设计与仿真[J]. 林业科学, 2025, 61(8): 11-24.
Yu Ru,Guopeng Xu,Gaoming Fan,Qiujie Li,Yongkui Yi,Li Ding,Hongping Zhou. Design and Simulation of Walnut Vibration Harvesting Control System Based on PLC[J]. Scientia Silvae Sinicae, 2025, 61(8): 11-24.
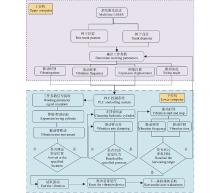
图1
核桃振动采收控制系统"
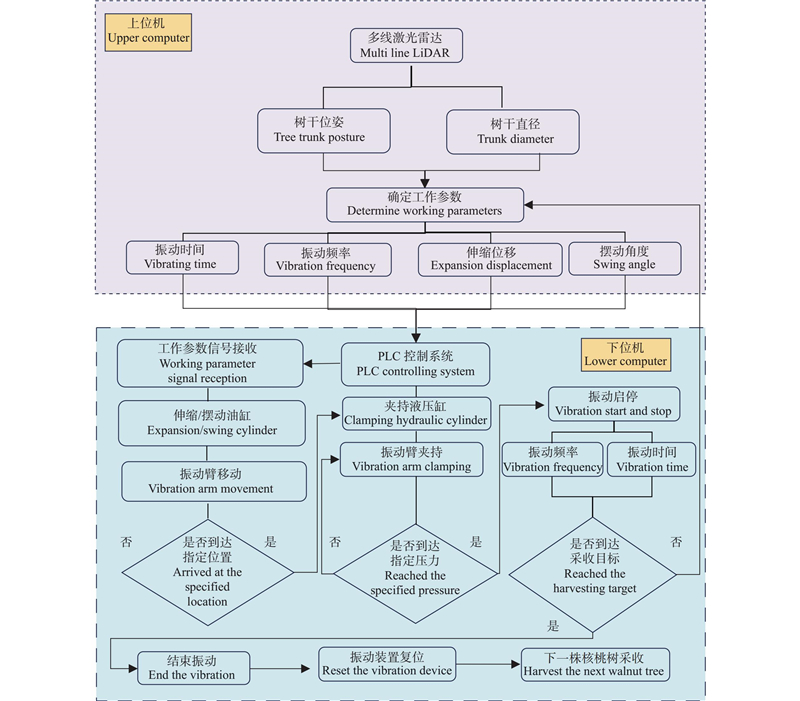

图2
核桃智能振动采收机示意 1. 摆动液压缸Oscillating cylinder;2. 伸缩液压缸Telescopic cylinder;3. 夹持液压缸Clamp cylinder"
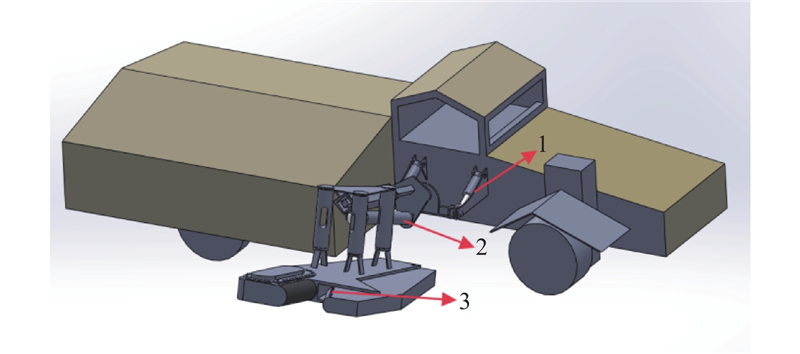

图3
应用激光雷达提取树干直径流程"

图4
树干点云获取"

表1
多线激光雷达VLP-16参数"
| 参数 Parameter | 数值Value |
| 尺寸 Dimension | 103 mm×72 mm |
| 质量 Quality | 830 g |
| 工作温度 Operating temperature | ?10~60 ℃ |
| 测量数据 Measurement data | 双回波距离及强度 Double echo distance and intensity |
| 最大测量距离 Maximum measurement range | 100 m |
| 精度 Accuracy | ±3 cm |
| 垂直视场 Vertical field of view | 30° |
| 水平视场 Horizontal field of view | 360° |
| 垂直角度分辨率 Vertical angular resolution | 2° |
| 水平角度分辨率 Horizontal angular resolution | 0.1°~0.4° |
| 测量频率Measurement frequency | 5~20 Hz |
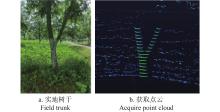
图5
树干点云"
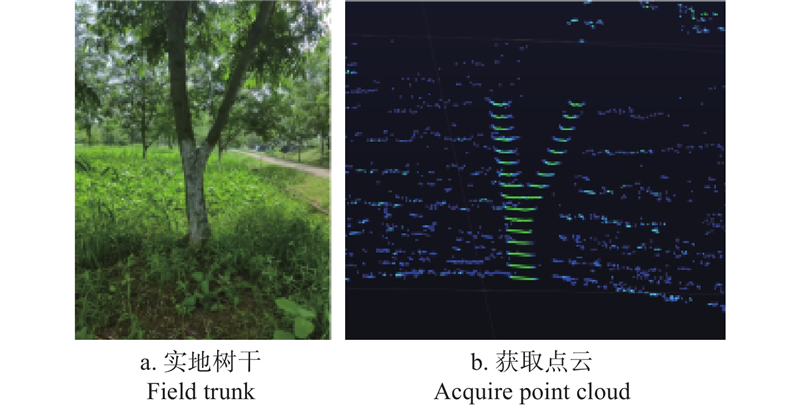

图6
树干圆柱拟合示意"
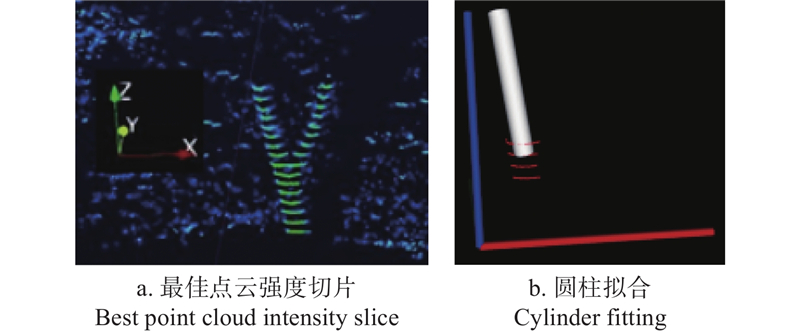
表2
树干直径测量值与提取值"
| 序号 No. | VLP-16高度 VLP-16 height/cm | 测量直径 Measure the diameter/cm | 提取直径 Extract the diameter/cm | |||
| 下 Lower | 中 Middle | 上 Top | 平均 Average | |||
| 1 | 85 | 74.60 | 72.20 | 65.50 | 70.77 | 66.72 |
| 2 | 85 | 77.50 | 67.60 | 62.80 | 69.30 | 64.64 |
| 3 | 85 | 59.60 | 53.40 | 51.70 | 54.90 | 50.49 |
| 4 | 85 | 65.40 | 55.40 | 54.70 | 58.50 | 53.61 |
| 5 | 85 | 57.00 | 49.80 | 48.30 | 51.70 | 46.92 |
| 6 | 85 | 71.30 | 57.70 | 54.30 | 61.10 | 56.34 |
| 7 | 114 | 54.50 | 45.30 | 41.20 | 47.00 | 42.51 |
| 8 | 85 | 49.40 | 38.90 | 35.50 | 41.27 | 36.58 |
| 9 | 85 | 64.50 | 57.80 | 54.30 | 58.87 | 54.47 |
| 10 | 85 | 79.40 | 70.30 | 67.00 | 72.23 | 67.49 |
| 11 | 85 | 72.10 | 56.70 | 52.50 | 60.43 | 55.50 |
| 12 | 85 | 64.30 | 55.90 | 55.00 | 58.40 | 53.62 |
| 13 | 85 | 54.20 | 46.60 | 44.80 | 48.53 | 44.36 |
| 14 | 85 | 59.70 | 50.10 | 51.00 | 53.60 | 49.07 |
| 15 | 85 | 69.00 | 63.20 | 61.40 | 64.53 | 59.98 |
| 16 | 85 | 78.00 | 69.50 | 63.20 | 70.23 | 65.98 |
| 17 | 70 | 79.00 | 67.80 | 62.80 | 69.87 | 65.37 |
| 18 | 65 | 88.20 | 78.10 | 61.50 | 75.93 | 71.52 |
| 19 | 65 | 78.80 | 77.70 | 69.70 | 75.40 | 70.42 |
| 20 | 65 | 73.60 | 58.80 | 55.00 | 62.47 | 57.59 |
| 21 | 65 | 54.00 | 45.00 | 48.30 | 49.10 | 44.72 |
| 22 | 65 | 76.20 | 67.90 | 62.00 | 68.70 | 63.99 |
| 23 | 65 | 39.70 | 29.50 | 29.80 | 33.00 | 28.62 |
| 24 | 65 | 60.20 | 51.60 | 47.20 | 53.00 | 48.37 |
| 25 | 93 | 66.20 | 57.40 | 50.20 | 57.93 | 53.15 |
| 26 | 65 | 57.00 | 46.90 | 44.20 | 49.37 | 45.28 |
| 27 | 65 | 55.70 | 49.50 | 44.40 | 49.87 | 45.32 |
| 28 | 92 | 81.40 | 87.00 | 79.10 | 82.50 | 78.45 |
| 29 | 92 | 71.00 | 56.20 | 50.90 | 59.37 | 54.70 |
| 30 | 92 | 47.70 | 37.40 | 36.20 | 40.43 | 35.87 |
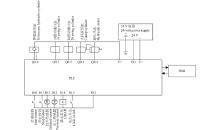
图7
振动采收控制系统的硬件接线"
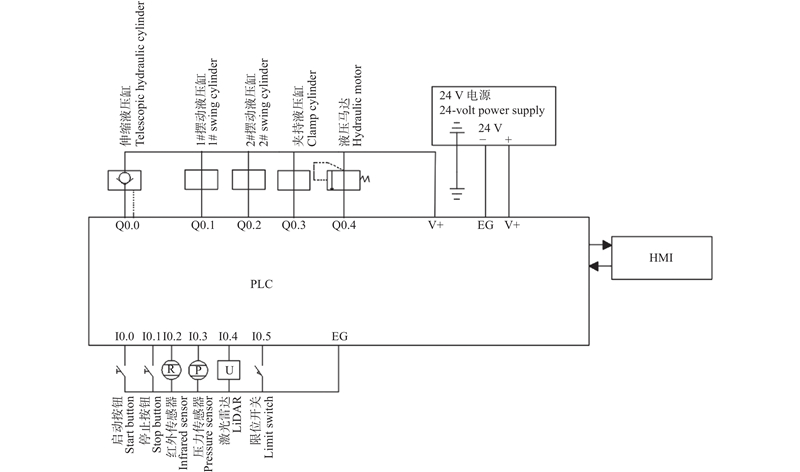
表3
PLC规格"
| 型号Model | 6ES7214-1AG40-0XB0 |
| 名称Designation | S7-1214C DC/DC/DC |
| 存储空间Storage space | 150 kB |
| I/O接口Input/output interface | 14DI,2AI,10DO |

图8
论域示意 NB:输入或输出的模糊变量的最大负值 Negative big;NM:输入或输出的模糊变量的中等负值Negative middle;NS:输入或输出的模糊变量的最小负值Negative small;O:输入或输出的模糊变量为零Zero;PS:输入或输出的模糊变量的最小正值Positive small;PM:输入或输出的模糊变量的中等正值Positive middle;PB:输入或输出的模糊变量的最大正值Positive big."
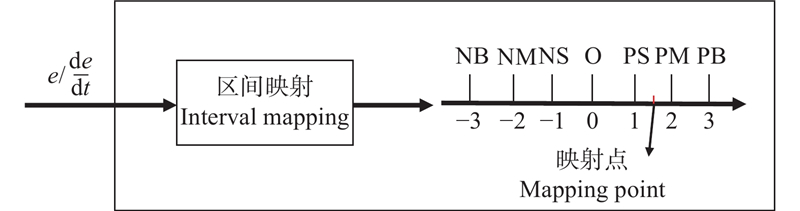
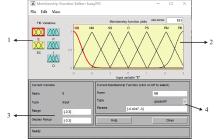
图9
模糊PID隶属函数"
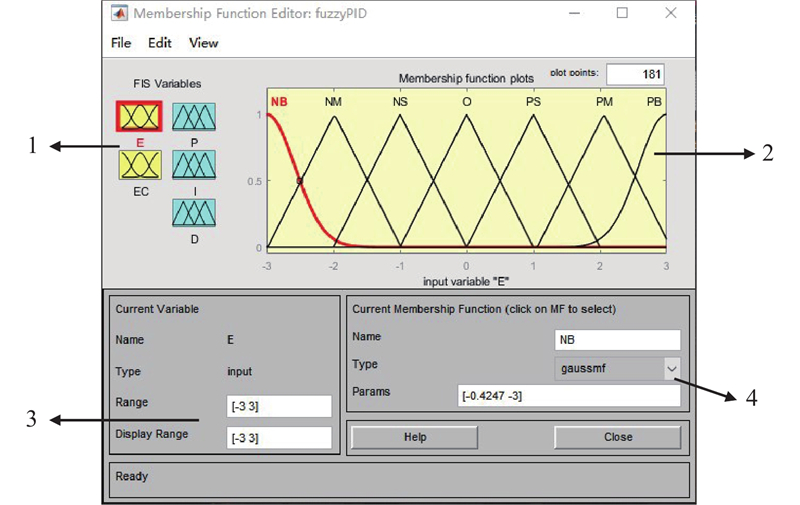
表4
$ {\mathit{k}}_{\mathbf{p}} $的模糊规则"
| e | |||||||
| NB | NM | NS | O | PS | PM | PB | |
| NB | PB | PB | PB | PB | PM | PS | O |
| NM | PB | PB | PB | PB | PM | O | O |
| NS | PM | PM | PM | PM | O | PS | NS |
| O | PM | PM | PS | O | NS | NS | NM |
| PS | PS | PS | O | NS | NM | NM | NM |
| PM | PS | O | NS | NM | NM | NM | NB |
| PB | O | O | NM | NM | NM | NB | NB |
表5
输入/输出(I/O)分配"
| 名称 Designation | 地址 Address |
| 启动按钮Start button | I0.0 |
| 停止按钮Stop button | I0.1 |
| 红外传感器Infrared sensor | I0.2 |
| 压力传感器Pressure sensor | I0.3 |
| 激光雷达LiDAR | I0.4 |
| 限位开关Limit switch | I0.5 |
| 伸缩液压缸Telescopic hydraulic cylinder | Q0.0 |
| 1#摆动液压缸1# swing hydraulic cylinder | Q0.1 |
| 2#摆动液压缸2# swing hydraulic cylinder | Q0.2 |
| 夹持液压缸Clamping hydraulic cylinder | Q0.3 |
| 液压马达Hydraulic motor | Q0.4 |

图10
PLC程序流程"
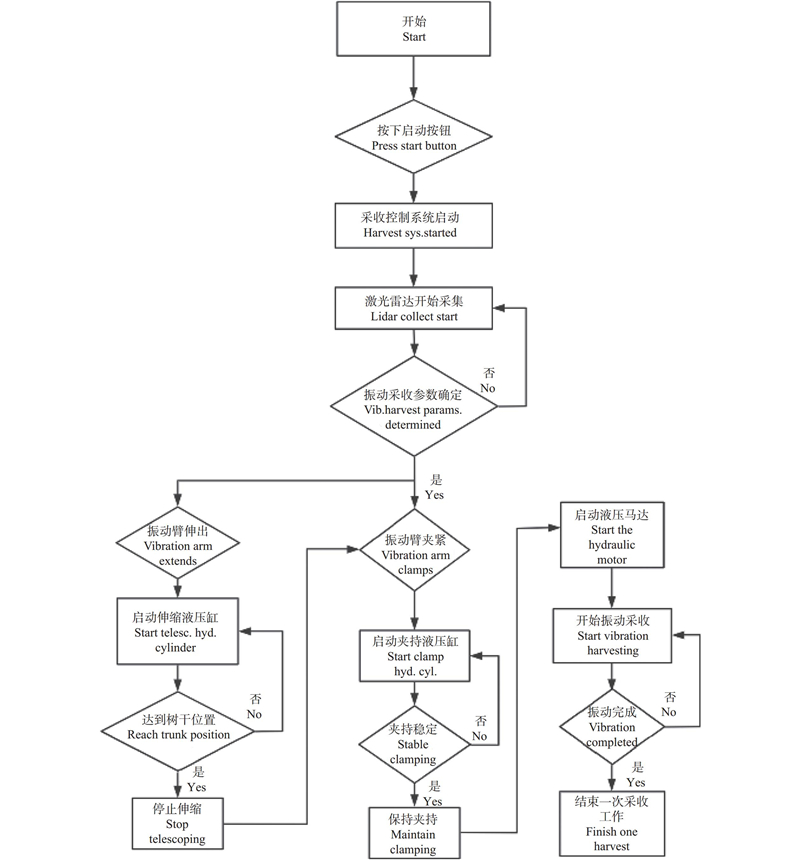

图11
部分PLC程序"
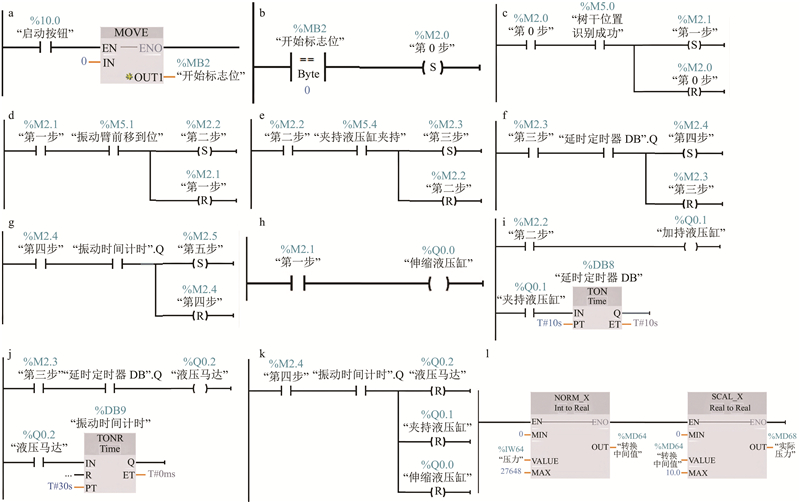

图12
监控软件主画面"
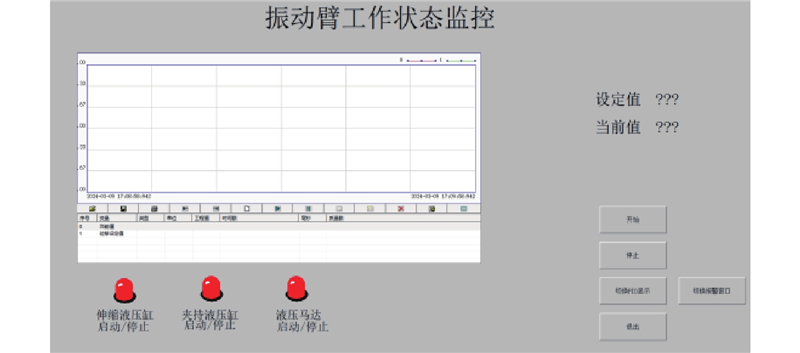
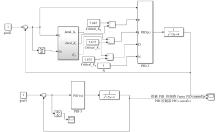
图13
模糊PID仿真框图"
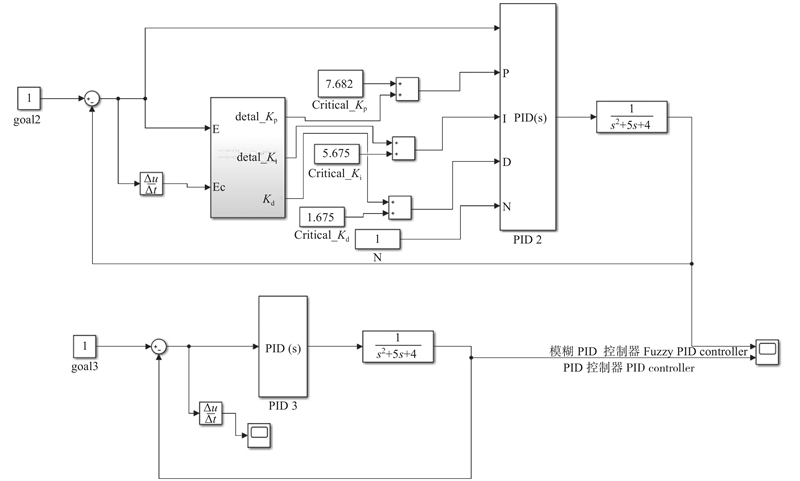

图14
核桃振动采收控制系统仿真平台 1. 伺服电动缸Servo electric cylinder;2. 伺服驱动器Servo driver;3. 伺服开关Servo switch;4. PLC;5. 直流电源DC power;6. 伸缩开关Telescopic switch;7. PLC程序PLC program."
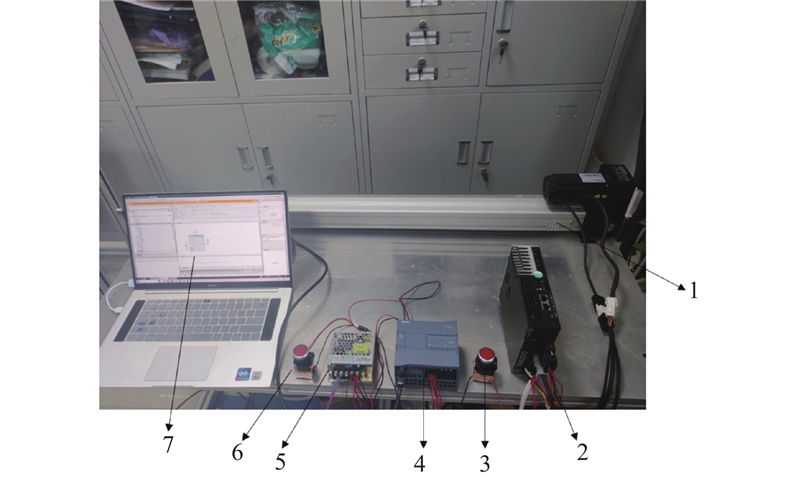

图15
正在进行核桃振动采收"


图16
振落果实计数"

图17
不同参数下系统的单位响应"
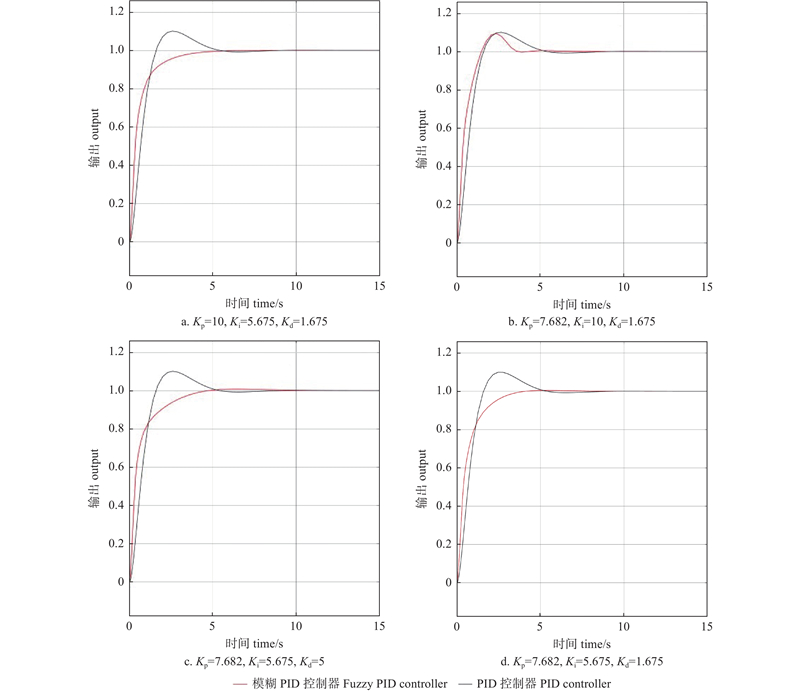
表6
系统单位响应的指标"
| 图序 Figure No. | 模糊PID控制器 Fuzzy PID controller | PID控制器 PID controller | |||||
| 上升时间 Rise time/s | 稳定时间 Settling time/s | 超调量 Overshoot (%) | 上升时间 Rise time/s | 稳定时间 Settling time/s | 超调量 Overshoot (%) | ||
| a | 1.52 | 15 | 0 | 0.8 | 5.3 | 0 | |
| b | 1.12 | 7.74 | 9.4 | 1.01 | 9.23 | 22.7 | |
| c | 1.92 | 11.95 | 0.7 | 2.03 | 14.44 | 4.6 | |
| d | 1.68 | 4.13 | 0.4 | 1.63 | 11.05 | 6.9 | |
表7
振动臂移动功能试验结果"
| 试验次数 Number of trials | 距离设定值 Set value of distance/cm | 实际移动距离 平均值 Avg. actual moving distance/cm | 移动时间 Moving time/s | 位移误差 Displacement error(%) |
| 1 | 20 | 19.97 | 2 | 0.15 |
| 2 | 40 | 39.98 | 4 | 0.05 |
| 3 | 60 | 59.97 | 6 | 0.02 |
| 4 | 80 | 79.98 | 8 | 0.03 |
| 5 | 100 | 99.98 | 10 | 0.02 |
表8
振动臂夹持功能试验结果"
| 树干直径 Trunk diameter/cm | 设定夹持力 Set clamping force/N | 实际夹持力 平均值 Avg. actual clamping force/N | 平均消耗 时间 Average time consumption/s | 夹持力误差 Clamping force error(%) |
| 15 | 2 500 | 2 432 | 5.2 | 2.72 |
| 16 | 2 600 | 2 555 | 5.2 | 1.73 |
| 17 | 2 700 | 2 648 | 5.3 | 1.93 |
| 18 | 2 800 | 2 742 | 5.5 | 2.01 |
| 19 | 2 900 | 2 846 | 5.5 | 1.86 |
| 20 | 3 000 | 2 964 | 5.6 | 1.20 |
表9
系统振动功能试验结果"
| 树干 直径 Trunk diameter/ cm | 设定值 Set value | 实际值 Actual value | 误差 Error | ||||
| 振动频率 Vibration frequency/Hz | 振动 时间 Vibration time/s | 振动频率 Vibration frequency/Hz | 振动 时间 Vibration time/s | 振动频率 Vibration frequency(%) | |||
| 15 | 10 | 15 | 9.7 | 21 | 3.00 | ||
| 16 | 11 | 20 | 10.7 | 27 | 2.72 | ||
| 17 | 12 | 25 | 11.8 | 31 | 1.67 | ||
| 18 | 13 | 35 | 12.7 | 43 | 2.31 | ||
| 19 | 14 | 45 | 13.8 | 53 | 1.43 | ||
| 20 | 15 | 50 | 14.9 | 59 | 0.67 | ||
图18
振动臂移动仿真"

图19
伸缩液压缸伸出"


图20
夹持液压缸进行夹持树干"

表10
核桃振动采收果实结果"
| 序号 No. | 振落果实 Fruit shaking off | 仍在树上果实 The fruits still on the tree | 采净率 Harvesting efficiency (%) | |||
| 青果 Green fruit/piece | 黑果 Black fruit/piece | 青果 Green fruit/piece | 黑果 Black fruit/piece | |||
| 1 | 55 | 25 | 12 | 6 | 81.6 | |
| 2 | 86 | 50 | 17 | 14 | 81.4 | |
| 3 | 116 | 114 | 10 | 14 | 90.6 | |
| 4 | 82 | 61 | 8 | 4 | 92.3 | |
| 5 | 92 | 62 | 10 | 5 | 91.1 | |
| 6 | 72 | 42 | 17 | 4 | 84.4 | |
| 7 | 82 | 41 | 9 | 2 | 91.8 | |
| 8 | 147 | 59 | 22 | 8 | 87.3 | |
| 9 | 103 | 86 | 24 | 6 | 86.3 | |
| 10 | 176 | 116 | 27 | 7 | 89.6 | |
| 11 | 182 | 92 | 42 | 13 | 83.3 | |
| 12 | 158 | 82 | 19 | 3 | 91.6 | |
| 13 | 154 | 19 | 7 | 5 | 93.5 | |
| 14 | 112 | 35 | 9 | 5 | 91.3 | |
| 15 | 221 | 14 | 8 | 7 | 94 | |
|
宫峥嵘, 王一峰, 王 翰, 等. 核桃矿质营养研究进展. 林业科学, 2021, 57 (1): 178- 190.
doi: 10.11707/j.1001-7488.20210119 |
|
|
Gong Z R, Wang Y F, Wang H, et al. Research progress on mineral nutrition of walnut. Scientia Silvae Sinicae, 2021, 57 (1): 178- 190.
doi: 10.11707/j.1001-7488.20210119 |
|
|
郭关柱, 杨李洋, 罗亚南, 等. 基于无人机平台的气振式核桃采收机设计与试验. 农业机械学报, 2024, 55 (1): 55- 64.
doi: 10.6041/j.issn.1000-1298.2024.01.005 |
|
|
Guo G Z, Yang L Y, Luo Y N, et al. Design and validation of pneumatic vibration walnut picking machine carried by UAV. Transactions of the Chinese Society for Agricultural Machinery, 2024, 55 (1): 55- 64.
doi: 10.6041/j.issn.1000-1298.2024.01.005 |
|
| 黄志鑫, 邢 涛, 邢艳秋. 基于背包激光扫描点云强度的胸径提取方法研究. 遥感技术与应用, 2021, 36 (6): 1284- 1293. | |
| Huang Z X, Xing T, Xing Y Q. Study on extraction method of DBH based on intensity of backpack laser scanning point cloud. Remote Sensing Technology and Application, 2021, 36 (6): 1284- 1293. | |
| 李 斌, 杨星宇, 刘向新, 等. 核桃机械化收获装置研究现状与展望. 中国农机化学报, 2024, 45 (8): 1- 7, 42. | |
| Li B, Yang X Y, Liu X X, et al. Research status and prospect of mechanized harvesting device for walnut. Journal of Chinese Agricultural Mechanization, 2024, 45 (8): 1- 7, 42. | |
| 李启丙. 基于组态软件的PLC控制系统全软件仿真. 机电工程技术, 2021, 50 (4): 135- 137. | |
| Li Q B. Full software simulation of PLC control system based on configuration software. Mechanical & Electrical Engineering Technology, 2021, 50 (4): 135- 137. | |
|
李秋洁, 徐 波, 束义平, 等. LiDAR探测自动对靶喷雾控制系统设计. 农机化研究, 2019, 41 (8): 65- 71.
doi: 10.3969/j.issn.1003-188X.2019.08.011 |
|
|
Li Q J, Xu B, Shu Y P, et al. Design of automatic target spray control system based on LiDAR. Journal of Agricultural Mechanization Research, 2019, 41 (8): 65- 71.
doi: 10.3969/j.issn.1003-188X.2019.08.011 |
|
| 刘 浩, 戴 宁. 基于树干振动原理的核桃采收机设计. 机械制造与自动化, 2023, 52 (1): 226- 229. | |
| Liu H, Dai N. Design of walnut harvester based on trunk vibration. Machine Building & Automation, 2023, 52 (1): 226- 229. | |
|
麻丽明, 樊新乾. 基于组态王生产线故障报警监控系统的设计. 机电工程技术, 2022, 51 (1): 139- 142.
doi: 10.3969/j.issn.1009-9492.2022.01.035 |
|
|
Ma L M, Fan X Q. Design of fault alarm monitoring system based on KingView production line. Mechanical & Electrical Engineering Technology, 2022, 51 (1): 139- 142.
doi: 10.3969/j.issn.1009-9492.2022.01.035 |
|
| 麻卫峰, 王金亮, 麻源源, 等. 改进K均值聚类的点云林木胸径提取. 测绘科学, 2021, 46 (9): 122- 129. | |
| Ma W F, Wang J L, Ma Y Y, et al. An improved K-means clustering method for DBH extraction from point cloud. Science of Surveying and Mapping, 2021, 46 (9): 122- 129. | |
| 乔园园, 牛长河, 孟详金, 等. 牵引式林果振动采收机的设计与田间试验. 新疆农业科学, 2015, 52 (3): 528- 534. | |
| Qiao Y Y, Niu C H, Meng X J, et al. Design of traction type fruit harvest machine and its experimental research in fields. Xinjiang Agricultural Sciences, 2015, 52 (3): 528- 534. | |
| 茹 煜, 范高鸣, 徐国鹏, 等. 核桃振动采收研究现状与发展趋势. 林业工程学报, 2024, 9 (1): 21- 31. | |
| Ru Y, Fan G M, Xu G P, et al. Research status and development trend of walnut vibration harvesting. Journal of Forestry Engineering, 2024, 9 (1): 21- 31. | |
| 石昌玉, 丁禹程, 曲 文, 等. 定制化被动式木门 窗材柔性分类智能控制系统设计. 森林工程, 2024, 40 (3): 162- 169. | |
| Shi C Y, Ding Y C, Qu W, et al. Design of customized passive wood door and window material flexible classification intelligent control system. Forest Engineering, 2024, 40 (3): 162- 169. | |
|
师素文, 张广红, 吴爱国. 基于PLC的万吨液压机控制系统设计. 制造技术与机床, 2005, (9): 34- 37.
doi: 10.3969/j.issn.1005-2402.2005.09.011 |
|
|
Shi S W, Zhang G H, Wu A G. Design of PLC-based control system for 10 000 t hydraulic press. Manufacturing Technology & Machine Tool, 2005, (9): 34- 37.
doi: 10.3969/j.issn.1005-2402.2005.09.011 |
|
| 束义平, 李秋洁, 周宏平, 等. 基于激光雷达探测的变量喷雾控制系统设计. 林业工程学报, 2020, 5 (1): 139- 147. | |
| Shu Y P, Li Q J, Zhou H P, et al. Design of variable rate spray control system based on LiDAR detection. Journal of Forestry Engineering, 2020, 5 (1): 139- 147. | |
|
王长勤, 许林云, 周宏平, 等. 基于PLC和MCGS的偏心式林果振动采收机控制系统设计. 农机化研究, 2013, 35 (3): 79- 83.
doi: 10.3969/j.issn.1003-188X.2013.03.018 |
|
|
Wang C Q, Xu L Y, Zhou H P, et al. Design of control system for eccentric-type forest-fruit vibration harvesting machine based on PLC and MCGS software. Journal of Agricultural Mechanization Research, 2013, 35 (3): 79- 83.
doi: 10.3969/j.issn.1003-188X.2013.03.018 |
|
|
夏小强. 基于PLC的采摘车控制系统设计. 工业控制计算机, 2023, 36 (12): 152- 153.
doi: 10.3969/j.issn.1001-182X.2023.12.063 |
|
|
Xia X Q. Design of PLC based control system for picking trucks. Industrial Control Computer, 2023, 36 (12): 152- 153.
doi: 10.3969/j.issn.1001-182X.2023.12.063 |
|
| 徐景中, 贾潇冉, 程昭文. 基于分层聚合的行道树点云树干检测方法. 激光与光电子学进展, 2023, 60 (12): 445- 452. | |
| Xu J Z, Jia X R, Cheng Z W. Detection method of street tree trunks from point clouds based on multilayer aggregation. Laser & Optoelectronics Progress, 2023, 60 (12): 445- 452. | |
| 姚宗旭, 张维国, 郭 帅, 等. 基于PLC智能控制的某球团厂放料测试研究. 有色设备, 2021, 35 (5): 29- 32. | |
| Yao Z X, Zhang W G, Guo S, et al. Research on the discharging test of a pelletizing plant based on PLC intelligent control. Nonferrous Metallurgical Equipment, 2021, 35 (5): 29- 32. | |
|
叶青青. 一种基于PLC控制的机械手液压系统设计. 电子制作, 2023, 31 (14): 17- 20.
doi: 10.3969/j.issn.1006-5059.2023.14.005 |
|
|
Ye Q Q. Design of a manipulator hydraulic system based on PLC control. Practical Electronics, 2023, 31 (14): 17- 20.
doi: 10.3969/j.issn.1006-5059.2023.14.005 |
|
| 赵艳莉, 赵 倩, 李志强. 基于PLC的山核桃破壳自动化生产线控制系统研究. 食品与机械, 2023, 39 (1): 111- 115, 194. | |
| Zhao Y L, Zhao Q, Li Z Q. Research on control system of Carya cathayensis shell breaking automatic production line based on PLC. Food & Machinery, 2023, 39 (1): 111- 115, 194. | |
| 祝前峰, 陆荣鉴, 刘 彬, 等. 核桃采摘机械研究现状与发展趋势. 林业和草原机械, 2021, 2 (1): 45- 53. | |
| Zhu Q F, Lu R J, Liu B, et al. Research status and development trend of walnut picking machinery. Forestry and Grassland Machinery, 2021, 2 (1): 45- 53. | |
|
朱世超, 王骋程, 王 超, 等. 基于支持向量聚类和模糊粗糙集的交通流数据修复方法. 森林工程, 2023, 39 (1): 157- 165.
doi: 10.3969/j.issn.1006-8023.2023.01.019 |
|
|
Zhu S C, Wang C C, Wang C, et al. Missing traffic flow data imputation based on support vector clustering and fuzzy rough set. Forest Engineering, 2023, 39 (1): 157- 165.
doi: 10.3969/j.issn.1006-8023.2023.01.019 |
|
|
朱兆廷, 孙玉军, 梁瑞婷, 等. 基于树冠和竞争因子的杉木胸径估测. 北京林业大学学报, 2023, 45 (9): 42- 51.
doi: 10.12171/j.1000-1522.20230011 |
|
|
Zhu Z T, Sun Y J, Liang R T, et al. Estimating DBH of Cunninghamia lanceolata based on crown and competition factors. Journal of Beijing Forestry University, 2023, 45 (9): 42- 51.
doi: 10.12171/j.1000-1522.20230011 |
|
|
Cao J L, Bai X P, Xu D C, et al. Experiment and analysis on walnut (Juglans regia L. ) shedding force based on low-frequency vibration response. Industrial Crops and Products, 2023, 204, 117242.
doi: 10.1016/j.indcrop.2023.117242 |
|
|
Castro-Garcia S, Aragon-Rodriguez F, Sola-Guirado R R, et al. Vibration monitoring of the mechanical harvesting of Citrus to improve fruit detachment efficiency. Sensors, 2019, 19 (8): 1760.
doi: 10.3390/s19081760 |
|
|
Du X Q, Chen K Z, Ma Z H, et al. Design, construction, and evaluation of a three-dimensional vibratory harvester for tree fruit. Applied Engineering in Agriculture, 2020, 36 (2): 221- 231.
doi: 10.13031/aea.13478 |
|
|
Du X Q, Jiang F, Li S T, et al. Design and experiment of vibratory harvesting mechanism for Chinese hickory nuts based on orthogonal eccentric masses. Computers and Electronics in Agriculture, 2019, 156, 178- 186.
doi: 10.1016/j.compag.2018.11.027 |
|
| Du X Q, Wu C Y, He L Y, et al. Dynamic characteristics of dwarf Chinese hickory trees under impact excitations for mechanical fruit harvesting. International Journal of Agricultural and Biological Engineering, 2015, 8 (1): 17- 25. | |
|
Jiao H B, Luo J M, Tang A F, et al. Design and testing of the double-symmetric eccentric exciter for fruit tree vibration harvest. Agriculture, 2024, 14 (4): 570.
doi: 10.3390/agriculture14040570 |
|
|
Liu C Y, Xu D C, Cao J L. Vibration response of walnuts under vibration harvesting. Agronomy, 2023, 13 (2): 461.
doi: 10.3390/agronomy13020461 |
|
|
Luo L P, Zhai Q P, Su Y J, et al. Simple method for direct crown base height estimation of individual conifer trees using airborne LiDAR data. Optics Express, 2018, 26 (10): A562- A578.
doi: 10.1364/OE.26.00A562 |
|
| Na L. 2019. Application of siemens Smart200 and S7-1200 PLC complex instructions in industrial automation. Proceedings of 2019 International Conference on Information Science, Medical and Health Informatics(ISMHI 2019), Yinchuan College of China University of Mining and Technology, 6. | |
|
Shaheed B N, Selman N H. Design and implementation of a control system for a steel plate cutting production line using programmable logic controller. International Journal of Electrical and Computer Engineering (IJECE), 2023, 13 (4): 3969- 3976.
doi: 10.11591/ijece.v13i4.pp3969-3976 |
| [1] | 茹煜,范高鸣,许林云,张海锋,周宏平,施明宏,王艳艳,崔王斌,徐国鹏. 柔性摇臂振动式核桃采收机设计及其振动性能[J]. 林业科学, 2025, 61(4): 180-195. |
| [2] | 刘鑫钰;侯晓鹏;苗虎;周玉成. 甲醛检测气候室控制系统的研制[J]. , 2013, 49(1): 185-188. |
| [3] | 胡天翔 郑加强 周宏平 丛静华. 提高动态树木图像分割处理速度的方法*[J]. 林业科学, 2009, 12(6): 62-67. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||