
Scientia Silvae Sinicae ›› 2026, Vol. 62 ›› Issue (5): 107-119.doi: 10.11707/j.1001-7488.LYKX20250341
• Research papers • Previous Articles Next Articles
Chennan Yu1,2,Shengshuai Wang1,Xingchen Gu1,Kun Yao1,Yonghong Wu1,Jianneng Chen1,2,*( )
)
Received:2025-05-29
Revised:2026-01-25
Online:2026-05-10
Published:2026-05-12
Contact:
Jianneng Chen
E-mail:jiannengchen@zstu.edu.cn
CLC Number:
Chennan Yu,Shengshuai Wang,Xingchen Gu,Kun Yao,Yonghong Wu,Jianneng Chen. Design and Testing of an in-situ Bundling Device and Bundling Strategy for Large Tree Earthballs[J]. Scientia Silvae Sinicae, 2026, 62(5): 107-119.
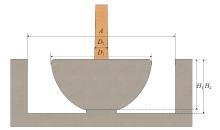
Fig.1
Soil ball excavation profile"
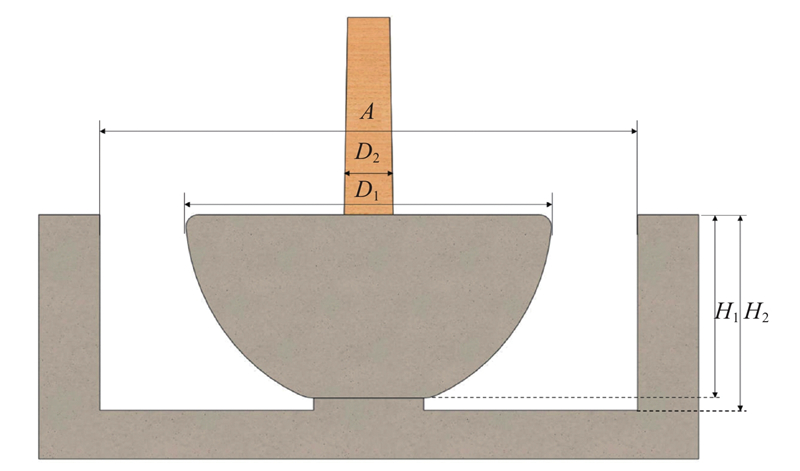

Fig.2
Schematic diagram of adjustable in-situ bundling device for large tree soil balls"
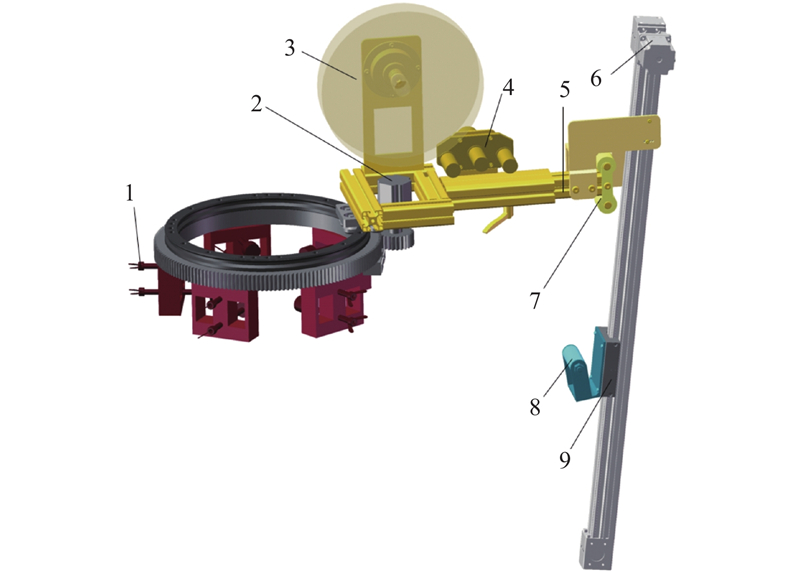

Fig.3
Schematic diagram of the soil ball binding device"
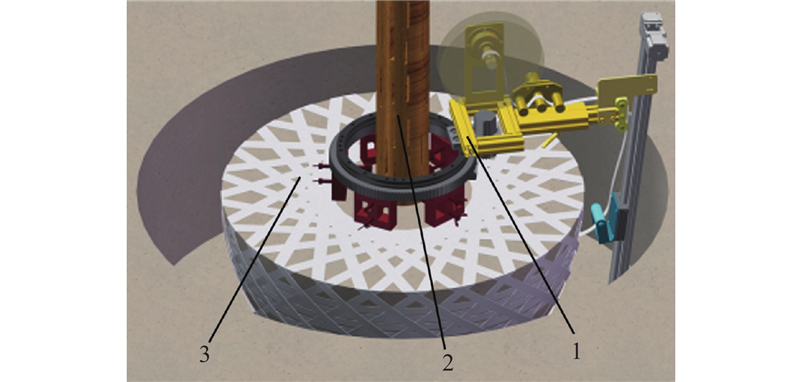

Fig.4
Positioning holding mechanisms"
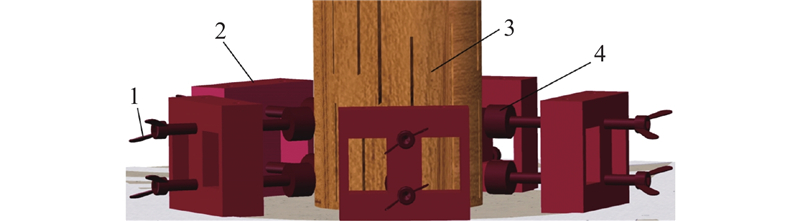
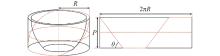
Fig.5
Theoretical bundle trajectory"
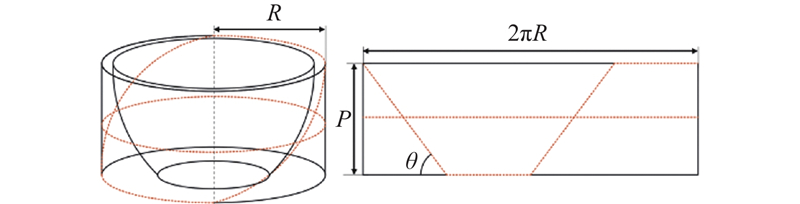

Fig.6
Bundle drive mechanism"
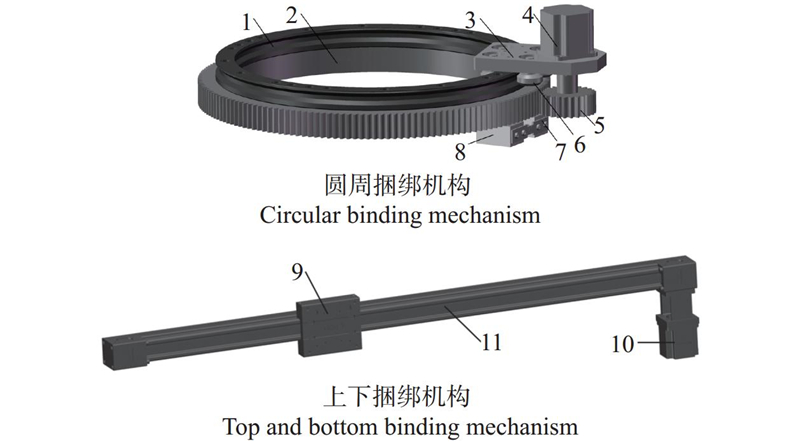
Table 1
Relationship between the number of teeth of the circumferential gear and the helix angle of the bundle"
| z1 | 30 | 25 | 20 |
| θ/(°) | 45 | 50.2 | 56.3 |
Table 2
Upper and lower-circumferential motor angular velocity ratio versus bundle helix angle"
| ωy/ωr | 1.3 | 1 | 0.7 |
| θ/(°) | 57.3 | 50.2 | 40 |

Fig.7
Tension control system"
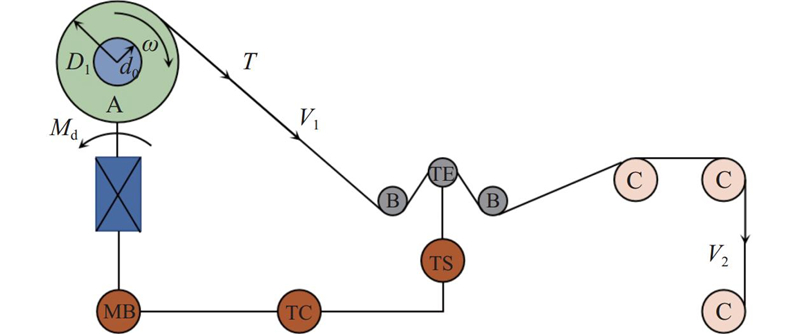
Fig.8
Tension control mechanism"
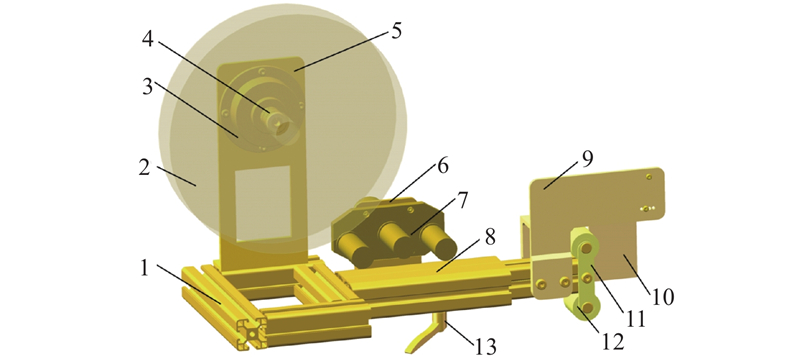
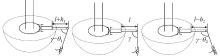
Fig.9
Schematic diagram of cantilever bundle adjustment combination"

Fig.10
Bundled executing agencies"

Table 3
Discrete element simulation parameters"
| 参数 Parameters | 数值 Numerical value | 参数 Parameters | 数值 Numerical value |
| 土壤密度 soil density /(kg·m?3) | 土壤?土壤恢复系数 Soil-soil coefficient of recovery | 0.513 | |
| 土壤泊松比 Soil Poisson’s ratio | 0.3 | 土壤?土壤静摩擦系数 Soil-soil static friction coefficient | 0.482 |
| 土壤剪切模量 Soil shear modulus/Pa | 1.264×106 | 土壤?土壤动摩擦系数 Soil-soil kinetic friction coefficient | 0.21 |
| 根系密度 Root density/(kg·m?3) | 803.4 | 根系?根系恢复系数 Roots - root recovery coefficient | 0.117 |
| 根系泊松比 Root Poisson’s ratio | 0.35 | 根系?根系静摩擦系数 Root system - root system static friction | 0.3 |
| 根系剪切模量 Root shear modulus/Pa | 1.732×107 | 根系?根系动摩擦系数 Root - root kinetic friction | 0.298 |
| 布条密度 Fabric density/(kg·m?3) | 5 | 土壤?根系恢复系数 Soil-root recovery coefficient | 0.6 |
| 布条泊松比 Fabric Poisson’s ratio | 0.5 | 土壤?根系静摩擦系数 Soil-root static friction | 0.32 |
| 布条剪切模量 Fabric shear modulus/Pa | 1×108 | 土壤?根系动摩擦系数 Soil-root kinetic friction | 0.353 |
| 布条?土壤恢复系数 Fabric-soil recovery coefficient | 0.05 | 布条?根系恢复系数 Cloth-root recovery coefficient | 0.05 |
| 布条?土壤静摩擦系数 Fabric-soil static friction coefficient | 0.354 | 布条?根系静摩擦系数 Cloth-root static friction | 0.529 |
| 布条?土壤动摩擦系数 Cloth strip-soil dynamic friction coefficient | 0.376 | 布条?根系动摩擦系数 Cloth-root kinetic friction | 0.596 |
Fig.11
Root-soil complex modeling"
Fig.12
Simulated shear test and firmness test"
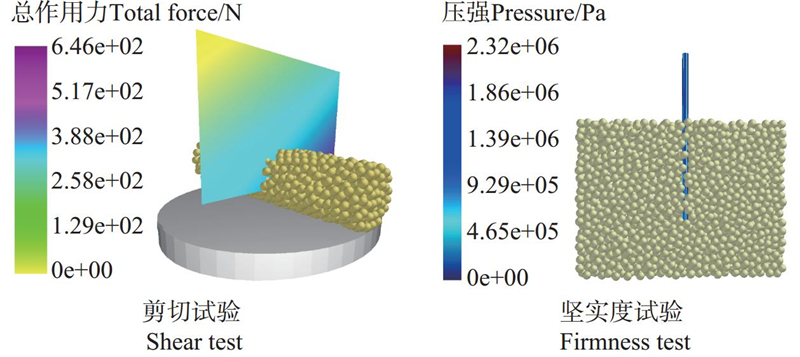

Fig.13
Simulation process"
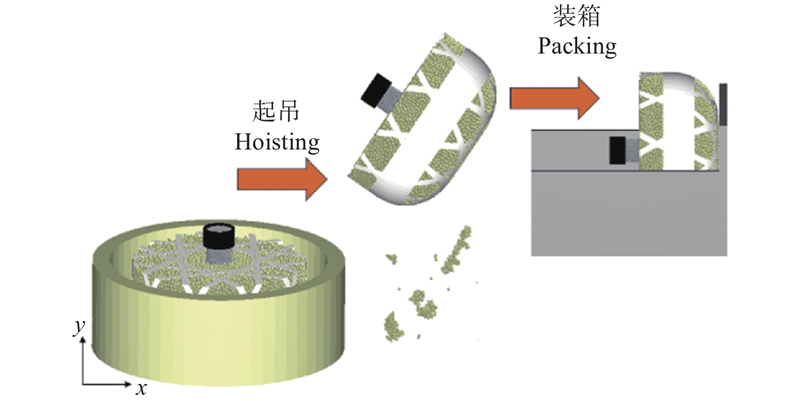
Fig.14
Bundle patterns"
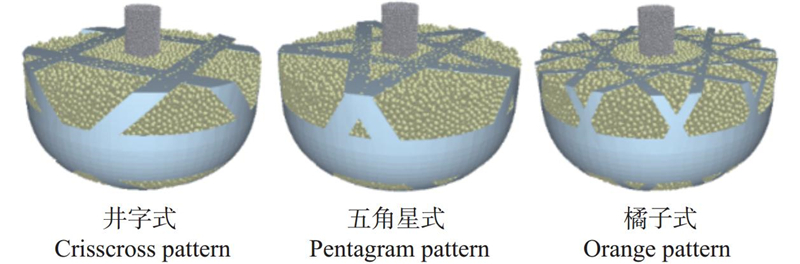
Table 4
Experimental program and results of optimal bundling patterns"
| 试验序号 Test No. | 因素Factor | 土壤留存率 Soil retention rate (%) | ||
| 捆绑花形 Bundle pattern | 摆动角度 Swing angle/(°) | 摆动频率 Swing frequency/ Hz | ||
| 1 | 井字式 Crisscross pattern | 5 | 10 | 86.96 |
| 2 | 井字式 Crisscross pattern | 10 | 20 | 79.23 |
| 3 | 五角星式 Pentagram pattern | 5 | 10 | 87.26 |
| 4 | 五角星式 Pentagram pattern | 10 | 20 | 80.52 |
| 5 | 橘子式 Orange pattern | 5 | 10 | 90.02 |
| 6 | 橘子式 Orange pattern | 10 | 20 | 82.23 |
Fig.15
Cloth extrusion test"
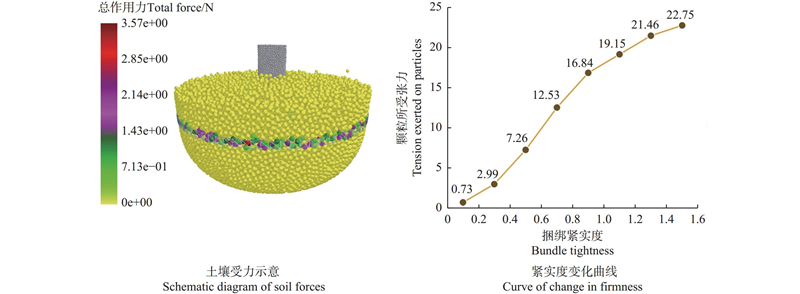
Table 5
Simulation factors and levels"
| 试验序号 Test No. | 因素Factor | ||
| 捆绑圈数 Number of ligature turns | 捆绑角度 Binding angle/(°) | 捆绑紧实度 Tightness/mm | |
| 1 | 15 | 30 | 0.5 |
| 0 | 20 | 45 | 1 |
| –1 | 25 | 60 | 1.5 |
Table 6
Experimental design program and results"
| 试验 序号 Test No. | 因素Factor | 土壤留存率 Soil retention rate(%) | 布条留存率 Fabric retention rate(%) | ||
| 捆绑圈数 Number of ligature turns | 捆绑 角度 Binding angle/(°) | 捆绑紧 实度 Tightness/ mm | |||
| 1 | 25 | 45 | 1.5 | 89.63 | 10.38 |
| 2 | 20 | 30 | 1.5 | 79.24 | 23.41 |
| 3 | 20 | 30 | 0.5 | 77.51 | 22.47 |
| 4 | 15 | 45 | 0.5 | 71.13 | 35.51 |
| 5 | 15 | 45 | 1.5 | 69.57 | 36.20 |
| 6 | 20 | 45 | 1 | 87.90 | 23.51 |
| 7 | 25 | 45 | 0.5 | 89.13 | 9.18 |
| 8 | 20 | 45 | 1 | 87.21 | 22.89 |
| 9 | 15 | 60 | 1 | 70.20 | 33.45 |
| 10 | 20 | 45 | 1 | 88.73 | 22.45 |
| 11 | 20 | 45 | 1 | 86.11 | 21.98 |
| 12 | 20 | 60 | 1.5 | 85.31 | 23.80 |
| 13 | 20 | 45 | 1 | 89.89 | 23.07 |
| 14 | 15 | 30 | 1 | 67.23 | 37.39 |
| 15 | 25 | 60 | 1 | 87.07 | 12.21 |
| 16 | 20 | 60 | 0.5 | 83.26 | 21.60 |
| 17 | 25 | 30 | 1 | 82.39 | 11.82 |
Table 7
Analysis of variance for soil retention"
| 方差来源 Source of variance | 平方和 Sum of squares | 自由度 Degrees of freedom | 均方 Mean square | F | P |
| 模型 Model | 973.36 | 9 | 108.15 | 42.17 | < |
| A | 614.08 | 1 | 614.08 | 239.43 | < |
| B | 47.39 | 1 | 47.39 | 18.48 | |
| C | 1 | ||||
| AB | 1 | ||||
| AC | 1.06 | 1 | 1.06 | ||
| BC | 1 | ||||
| A2 | 170.06 | 1 | 170.06 | 66.31 | < |
| B2 | 100.69 | 1 | 100.69 | 39.26 | |
| C2 | 12.86 | 1 | 12.86 | 5.01 | |
| 残差 Residual | 17.95 | 7 | 2.56 | ||
| 失拟项 Misfit term | 9.65 | 3 | 3.22 | 1.55 | |
| 纯误差 Pure error | 8.31 | 4 | 2.08 | ||
| 总和 Sum | 991.31 | 16 |
Table 8
Analysis of Variance for Cloth Retention"
| 方差来源 Source of variance | 平方和 Sum of squares | 自由度 Degrees of freedom | 均方 Mean square | F | P |
| 模型Model | 3 | 409.78 | 379.88 | < | |
| A | 1 | < | |||
| B | 2.03 | 1 | 2.03 | 1.88 | |
| C | 3.16 | 1 | 3.16 | 2.93 | |
| 残差 Residual | 14.02 | 13 | 1.08 | ||
| 失拟项 Misfit term | 12.65 | 9 | 1.41 | 4.08 | |
| 纯误差 Pure error | 1.38 | 4 | |||
| 总和 Sum | 16 |
Fig.16
Factor interaction response surface"
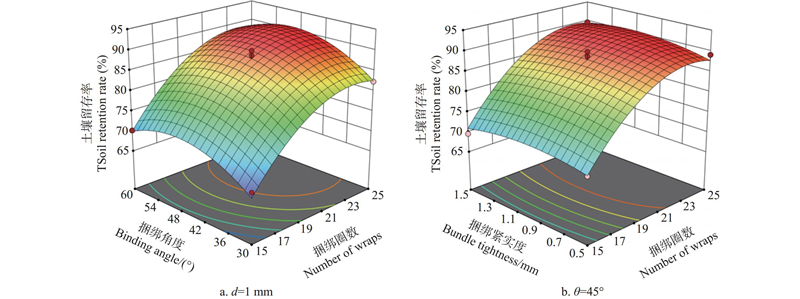

Fig.17
Bench test"

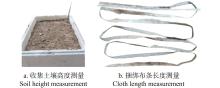
Fig.18
Evaluation outcome measurement chart"
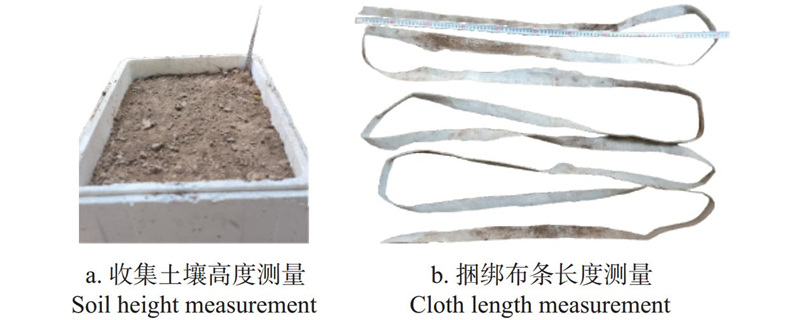
Table 9
Experimental results of bundling, lifting and crating"
| 评价指标 Evaluation indicators | 土球编号Soil ball No. | ||||
| 1 | 2 | 3 | 4 | 5 | |
| 土壤留存率 Soil retention rate(%) | 80.1 | 88.9 | 87.71 | 82.53 | 81.35 |
| 布条留存率 Fabric retention rate(%) | 25.14 | 25.67 | 25.74 | 25.37 | 25.67 |

Fig.19
Bundle tension pre-test"
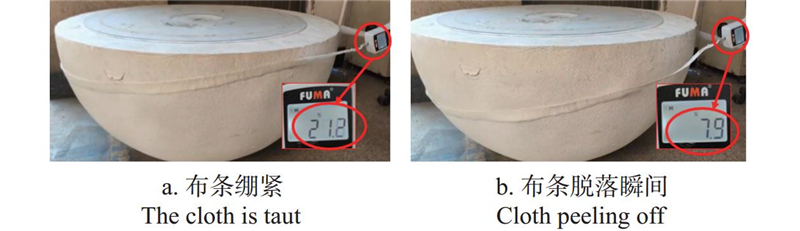
Fig.20
Bench test"
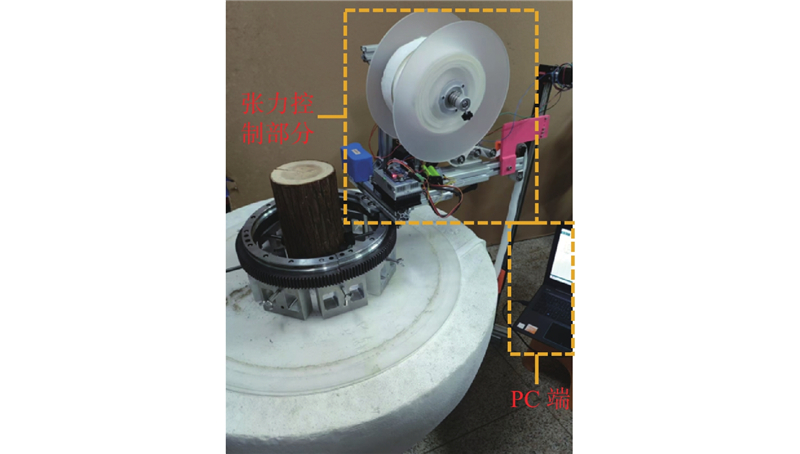
Fig.21
Tensor variance plot"
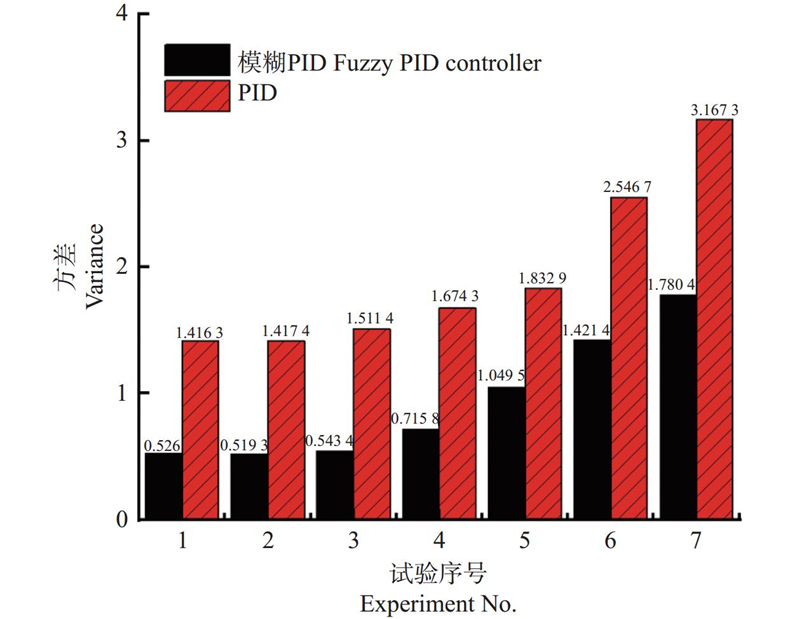

Fig.22
Forest validation trials"


Fig.23
Bundle flowchart"

Table 10
Bench tests and results"
| 试验 序号 Test No. | 因素Factor | 捆绑时间 Bundle time/s | 波动率 Fluctuation rate (%) | |
| 上下步进电机 转速 Upper and lower stepper motor speed/(r·min?1) | 圆周步进电机 转速 Circumferential stepping motor speed/(r·min?1) | |||
| 1 | 25.5 | 15 | 617 | 4.71 |
| 2 | 51 | 30 | 308 | 5.89 |
| 3 | 76.5 | 45 | 206 | 5.95 |
| 4 | 105 | 60 | 154 | 7.48 |
| 5 | 127.5 | 75 | 123 | 9.15 |
| 6 | 153 | 90 | 103 | 11.97 |
| 7 | 178.5 | 105 | 88 | 12.35 |
Table 11
Machine binding time"
| 编号 No. | 土球直径 Diameter of soil ball/mm | 机器安装 Machine installation/s | 执行捆绑 Machine bundling/s | 机器拆卸 Machine disassembly/s | 总时间 Total time/s |
| 1 | 900 | 156 | 206 | 94 | 456 |
| 2 | 138 | 206 | 95 | 438 | |
| 3 | 146 | 206 | 98 | 450 | |
| 4 | 155 | 206 | 107 | 468 | |
| 5 | 153 | 206 | 115 | 474 |
Table 12
Comparison of bundling efficiency"
| 编号 No. | 土球直径 Diameter of soil ball/mm | 机器捆绑 Machine binding/s | 手工捆绑 Manual bundling/s | 提升效率 Efficiency improvement/(%) |
| 1 | 900 | 456 | 486 | 6.17 |
| 2 | 438 | 504 | 13.10 | |
| 3 | 450 | 684 | 34.21 | |
| 4 | 468 | 762 | 38.58 | |
| 5 | 474 | 786 | 39.69 |
Table 13
Comparison of soil retention rates"
| 编号 No. | 土球直径 Diameter of soil ball/mm | 机器捆绑 Machine binding(%) | 手工捆绑 Manual bundling(%) | 留存率提升 Increased retention rate(%) |
| 1 | 900 | 89.9 | 86.6 | 3.81 |
| 2 | 88.6 | 85.15 | 4.05 | |
| 3 | 88.72 | 83.1 | 6.76 | |
| 4 | 87.92 | 81.1 | 8.41 | |
| 5 | 87.1 | 80.43 | 8.29 |
|
陈 勇. 大树移植的土球挖掘及包扎技术. 福建农业科技, 2017, 48 (2): 47- 49.
doi: 10.13651/j.cnki.fjnykj.2017.02.015 |
|
|
Chen Y. Techniques of soil ball digging and bandaging in big tree transplanting. Fujian Agricultural Science and Technology, 2017, 48 (2): 47- 49.
doi: 10.13651/j.cnki.fjnykj.2017.02.015 |
|
| 崔腾娇, 刘俊峰, 李建平, 等. 果树苗木捆扎机的设计. 农机化研究, 2014, 36 (6): 101- 104, 108. | |
| Cui T J, Liu J F, Li J P, et al. Design of fruit tree seedlings strapping machine. Journal of Agricultural Mechanization Research, 2014, 36 (6): 101- 104, 108. | |
| 林 钊. 2014. 福州城市园林建设中大树保护性移植养护技术研究. 福州: 福建农林大学. | |
| Lin Z. 2014. Study on protective transplanting and maintenance technology of big trees in Fuzhou urban landscape construction. Fuzhou: Fujian Agriculture and Forestry University. [in Chinese] | |
| 刘俊安. 2018. 基于离散元方法的深松铲参数优化及松土综合效应研究. 北京: 中国农业大学. | |
| Liu J A. 2018. Study on parameter optimization of subsoiling shovel and comprehensive effect of scarifying soil based on discrete element method. Beijing: China Agricultural University. [in Chinese] | |
| 孟庆伟, 王 浩, 韩 平, 等. 2023. 苗木土球打包装置. 内蒙古自治区: CN115968743A, 2023−04−18. | |
| Meng Q W, Wang H, Han P, et al. 2023. Seedling soil ball packaging device. Inner Mongolia Autonomous Region: CN115968743A, 2023−04−18. [in Chinese] | |
| 仝奔奔. 2023. 一种园林绿化工程树木移植土球维护设备. 江苏省: CN113491229B, 2023−05−23. | |
| Tu B B. 2023. A soil ball maintenance equipment for tree transplantation in landscaping engineering. Jiangsu Province: CN113491229B, 2023−05−23. [in Chinese] | |
|
吴 娴, 祁 鹏, 吴正兵, 等. 城市园林绿化中大树移植与养护技术. 种子科技, 2022, 40 (18): 52- 54, 63.
doi: 10.3969/j.issn.1674-5329.2025.03.062 |
|
|
Wu X, Qi P, Wu Z B, et al. Transplanting and maintenance technology of big trees in urban landscaping. Seed Science and Technology, 2022, 40 (18): 52- 54, 63.
doi: 10.3969/j.issn.1674-5329.2025.03.062 |
|
| 许 静, 刘宝伟, 陈平录, 等. 油茶林立式螺旋松土除草机设计与试验. 农业机械学报, 2023, 54 (12): 79- 87. | |
| Xu J, Liu B W, Chen P L, et al. Development and experiment of vertical spiral cutter for soil loosening and weeding in Camellia oleifera forest. Transactions of the Chinese Society for Agricultural Machinery, 2023, 54 (12): 79- 87. | |
| 闫 珊, 付天宇, 许家忠, 等. 基于改进遗传算法的纤维张力模糊控制研究. 复合材料科学与工程, 2025 (2): 54- 61, 144. | |
| Yan S, Fu T Y, Xu J Z, et al. Fiber tension fuzzy control research based on improved genetic algorithm. Composites Science and Engineering, 2025 (2): 54- 61, 144. | |
|
杨 琨. 提高大树移栽成活率的有效措施探讨. 石河子科技, 2022 (2): 3- 4.
doi: 10.3969/j.issn.1008-0899.2022.02.003 |
|
|
Yang K. Discussion on effective measures to improve the survival rate of transplanting big trees. Shihezi Science and Technology, 2022 (2): 3- 4.
doi: 10.3969/j.issn.1008-0899.2022.02.003 |
|
| 张贺帅, 孙金卓, 武家任, 等. 2023. 可调节苗木捆扎设备及苗木捆扎方法. 河北省: CN202310423085.3, 2023−06−23. | |
| Zhang H S, Sun J Z, Wu J R, et al. 2023. Adjustable seedling strapping equipment and method. Hebei Province: CN202310423085.3, 2023−06−23. [in Chinese] | |
| 赵 磊, 赵传来, 杨春廷, 等. 2023. 一种瓣式挖树机树球绕线式包装机. 山东省: CN108012804B, 2023−04−28. | |
| Zhao L, Zhao C L, Yang C T, et al. 2023. A petal-shaped tree ball winding packaging machine. Shandong Province: CN108012804B, 2023−04−28. [in Chinese] | |
| 赵淑红, 刘汉朋, 杨 超, 等. 玉米秸秆还田交互式分层深松铲设计与离散元仿真. 农业机械学报, 2021 (3): 75- 87. | |
| Zhao S H, Liu H P, Yang C, et al. Design and discrete element simulation of interactive layered subsoiler with maize straw returned to filed. Transactions of the Chinese Society for Agricultural Machinery, 2021 (3): 75- 87. | |
|
Alam M, Jiang Y J, Umar M, et al. Influence of drainage and root biomass on soil mechanical behavior in triaxial tests. Acta Geotechnica, 2022, 17 (7): 2875- 2893.
doi: 10.1007/s11440-021-01380-w |
|
|
Feng G J. Direct shear test analysis of root-soil complex considering the change of shear surface area. Ferroelectrics, 2021, 578 (1): 140- 151.
doi: 10.1080/00150193.2021.1902776 |
|
| Liu X H, Li X. 2010. Research on tension control system based on fuzzy self-tuning PID control. 2010 Chinese Control and Decision Conference. May 26−28, 2010, Xuzhou, China, IEEE, 3385−3390. | |
|
Pryor M, Watson G. Mature tree transplanting: science supports best management practice. Arboricultural Journal, 2016, 38 (1): 2- 27.
doi: 10.1080/03071375.2016.1157401 |
|
| Sun Y. Big tree transplanting techniques in urban road renovation: a case study of big tree transplanting in urban road renovation of Jinchang City, Gansu Province. Journal of Landscape Research, 2015, 7 (1): 1- 2. | |
|
Zhang C B, Chen L H, Liu Y P, et al. Triaxial compression test of soil–root composites to evaluate influence of roots on soil shear strength. Ecological Engineering, 2010, 36 (1): 19- 26.
doi: 10.1016/j.ecoleng.2009.09.005 |
| [1] | Wangbin Cui,Hongping Zhou,Yang Zhang,Yanyan Wang,Linyun Xu,Gaoming Fan. Optimisation and Testing of Vibration Parameters of Walnut Trees Based on Point Cloud Modelling [J]. Scientia Silvae Sinicae, 2026, 62(2): 186-203. |
| [2] | Liyang Yao,Yue Zhu,Yaning Wang,Shuai Pang. Impact of Tire Size on the Driving Performance of Small Wheeled Mobile Platforms in Forest [J]. Scientia Silvae Sinicae, 2025, 61(2): 180-189. |
| [3] | Xingmei Zhang,Yuhan Qi,Ding Ren,Guofu Qu,Yucheng Zhou. Synchronization Control of the Hot Platen Lifting System in Continuous Flat Press Based on Predictive Control [J]. Scientia Silvae Sinicae, 2020, 56(6): 83-93. |
| [4] | Weixi Yang. THE PRELIMINARY DISCUSSION ON SOIL DESICCATION OF ARTIFICIAL VEGETATION IN THE NORTHERN REGIONS OF CHINA [J]. Scientia Silvae Sinicae, 1996, 32(1): 78-85. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||