
Scientia Silvae Sinicae ›› 2025, Vol. 61 ›› Issue (8): 11-24.doi: 10.11707/j.1001-7488.LYKX20240430
• Special subject: Special topic on forestry mechanization operations • Previous Articles Next Articles
Yu Ru1,2,*( ),Guopeng Xu1,Gaoming Fan1,Qiujie Li1,Yongkui Yi1,Li Ding1,Hongping Zhou1,2
),Guopeng Xu1,Gaoming Fan1,Qiujie Li1,Yongkui Yi1,Li Ding1,Hongping Zhou1,2
Received:2024-07-11
Online:2025-08-25
Published:2025-09-02
Contact:
Yu Ru
E-mail:superchry@163.com
CLC Number:
Yu Ru,Guopeng Xu,Gaoming Fan,Qiujie Li,Yongkui Yi,Li Ding,Hongping Zhou. Design and Simulation of Walnut Vibration Harvesting Control System Based on PLC[J]. Scientia Silvae Sinicae, 2025, 61(8): 11-24.
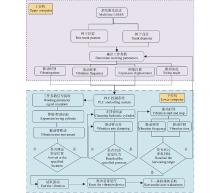
Fig.1
Walnut vibration harvesting control system"
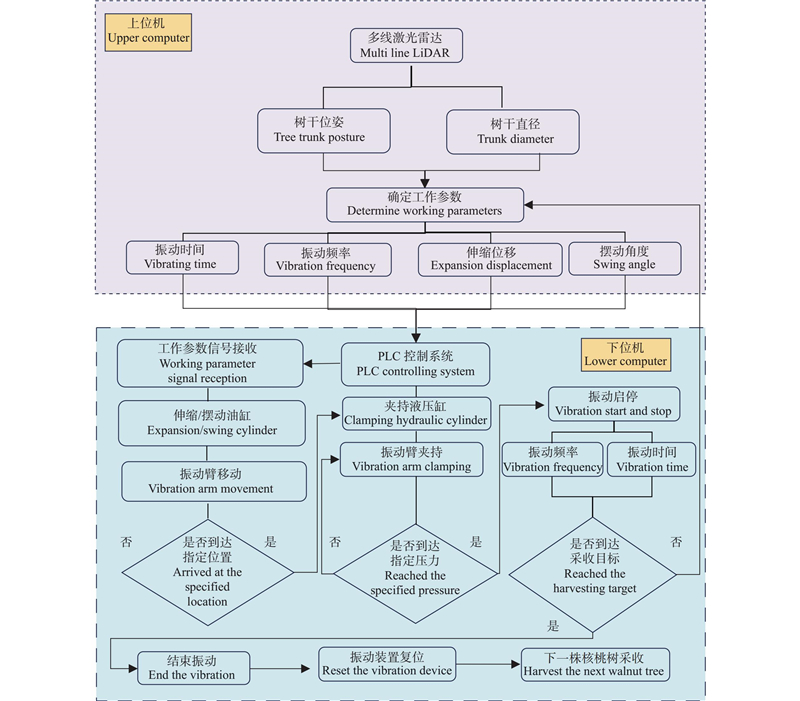

Fig.2
Schematic diagram of walnut intelligent vibrating harvester"
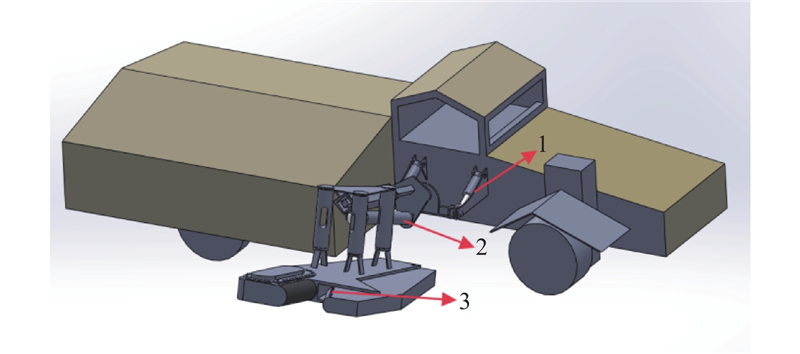

Fig.3
Flow chart of extracting tree trunk diameter using LiDAR"
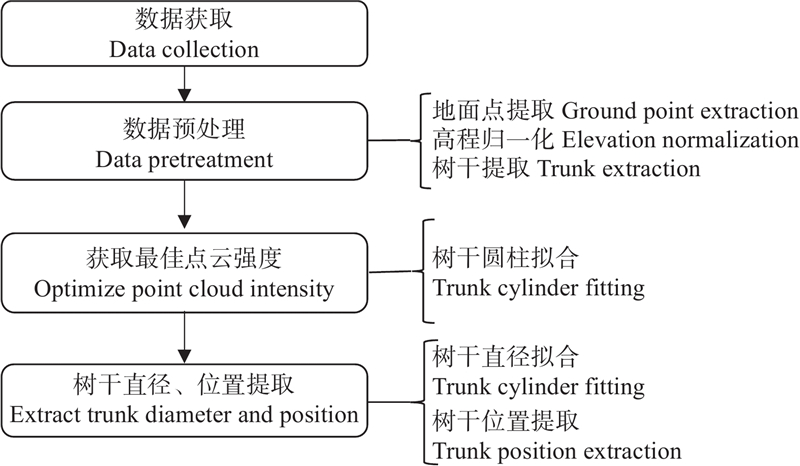

Fig.4
Tree trunk point cloud acquisition"

Table 1
VLP-16 parameters of multi line LiDAR"
| 参数 Parameter | 数值Value |
| 尺寸 Dimension | 103 mm×72 mm |
| 质量 Quality | 830 g |
| 工作温度 Operating temperature | ?10~60 ℃ |
| 测量数据 Measurement data | 双回波距离及强度 Double echo distance and intensity |
| 最大测量距离 Maximum measurement range | 100 m |
| 精度 Accuracy | ±3 cm |
| 垂直视场 Vertical field of view | 30° |
| 水平视场 Horizontal field of view | 360° |
| 垂直角度分辨率 Vertical angular resolution | 2° |
| 水平角度分辨率 Horizontal angular resolution | 0.1°~0.4° |
| 测量频率Measurement frequency | 5~20 Hz |
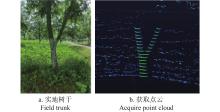
Fig.5
Tree trunk point cloud"
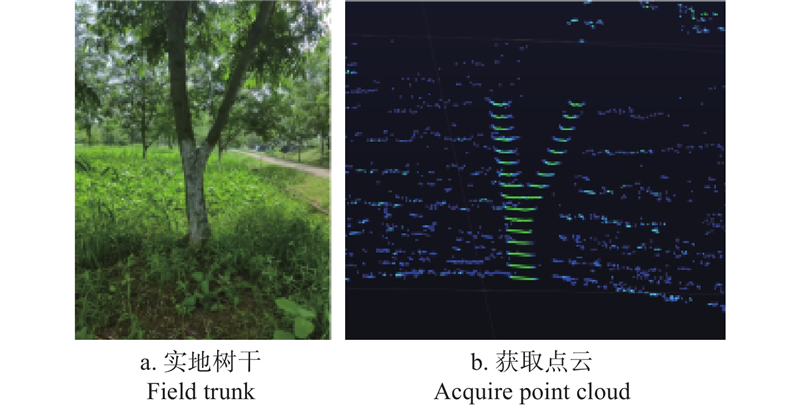

Fig.6
Schematic diagram of cylindrical fitting of tree trunk"
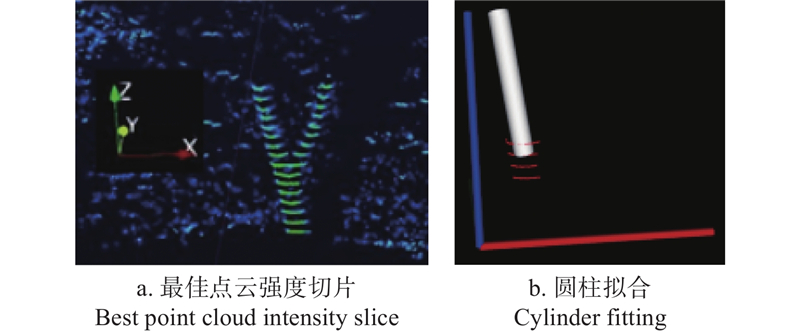
Table 2
Measured and extracted trunk diameters"
| 序号 No. | VLP-16高度 VLP-16 height/cm | 测量直径 Measure the diameter/cm | 提取直径 Extract the diameter/cm | |||
| 下 Lower | 中 Middle | 上 Top | 平均 Average | |||
| 1 | 85 | 74.60 | 72.20 | 65.50 | 70.77 | 66.72 |
| 2 | 85 | 77.50 | 67.60 | 62.80 | 69.30 | 64.64 |
| 3 | 85 | 59.60 | 53.40 | 51.70 | 54.90 | 50.49 |
| 4 | 85 | 65.40 | 55.40 | 54.70 | 58.50 | 53.61 |
| 5 | 85 | 57.00 | 49.80 | 48.30 | 51.70 | 46.92 |
| 6 | 85 | 71.30 | 57.70 | 54.30 | 61.10 | 56.34 |
| 7 | 114 | 54.50 | 45.30 | 41.20 | 47.00 | 42.51 |
| 8 | 85 | 49.40 | 38.90 | 35.50 | 41.27 | 36.58 |
| 9 | 85 | 64.50 | 57.80 | 54.30 | 58.87 | 54.47 |
| 10 | 85 | 79.40 | 70.30 | 67.00 | 72.23 | 67.49 |
| 11 | 85 | 72.10 | 56.70 | 52.50 | 60.43 | 55.50 |
| 12 | 85 | 64.30 | 55.90 | 55.00 | 58.40 | 53.62 |
| 13 | 85 | 54.20 | 46.60 | 44.80 | 48.53 | 44.36 |
| 14 | 85 | 59.70 | 50.10 | 51.00 | 53.60 | 49.07 |
| 15 | 85 | 69.00 | 63.20 | 61.40 | 64.53 | 59.98 |
| 16 | 85 | 78.00 | 69.50 | 63.20 | 70.23 | 65.98 |
| 17 | 70 | 79.00 | 67.80 | 62.80 | 69.87 | 65.37 |
| 18 | 65 | 88.20 | 78.10 | 61.50 | 75.93 | 71.52 |
| 19 | 65 | 78.80 | 77.70 | 69.70 | 75.40 | 70.42 |
| 20 | 65 | 73.60 | 58.80 | 55.00 | 62.47 | 57.59 |
| 21 | 65 | 54.00 | 45.00 | 48.30 | 49.10 | 44.72 |
| 22 | 65 | 76.20 | 67.90 | 62.00 | 68.70 | 63.99 |
| 23 | 65 | 39.70 | 29.50 | 29.80 | 33.00 | 28.62 |
| 24 | 65 | 60.20 | 51.60 | 47.20 | 53.00 | 48.37 |
| 25 | 93 | 66.20 | 57.40 | 50.20 | 57.93 | 53.15 |
| 26 | 65 | 57.00 | 46.90 | 44.20 | 49.37 | 45.28 |
| 27 | 65 | 55.70 | 49.50 | 44.40 | 49.87 | 45.32 |
| 28 | 92 | 81.40 | 87.00 | 79.10 | 82.50 | 78.45 |
| 29 | 92 | 71.00 | 56.20 | 50.90 | 59.37 | 54.70 |
| 30 | 92 | 47.70 | 37.40 | 36.20 | 40.43 | 35.87 |
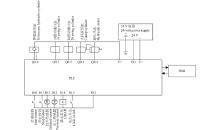
Fig.7
Hardware wiring diagram of the vibratory recovery control system"
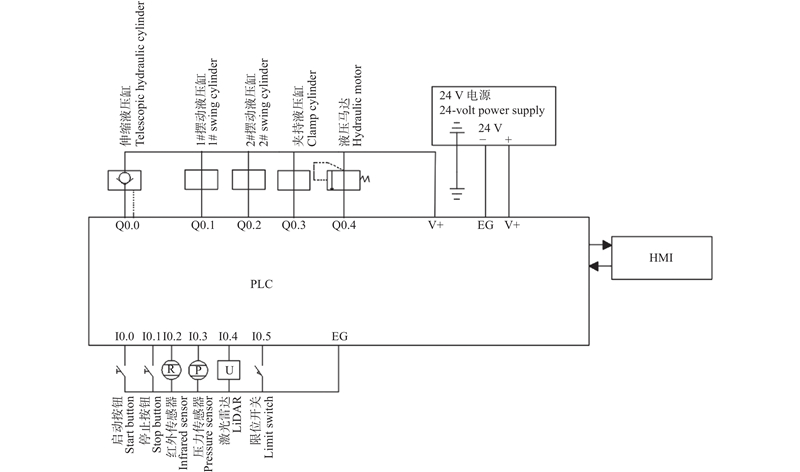
Table 3
PLC specifications"
| 型号Model | 6ES7214-1AG40-0XB0 |
| 名称Designation | S7-1214C DC/DC/DC |
| 存储空间Storage space | 150 kB |
| I/O接口Input/output interface | 14DI,2AI,10DO |

Fig.8
Schematic diagram of the domain"
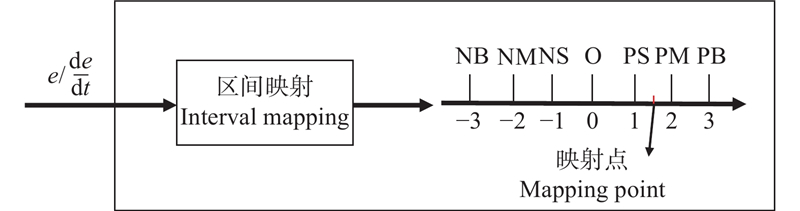
Fig.9
Fuzzy PID membership function diagram"
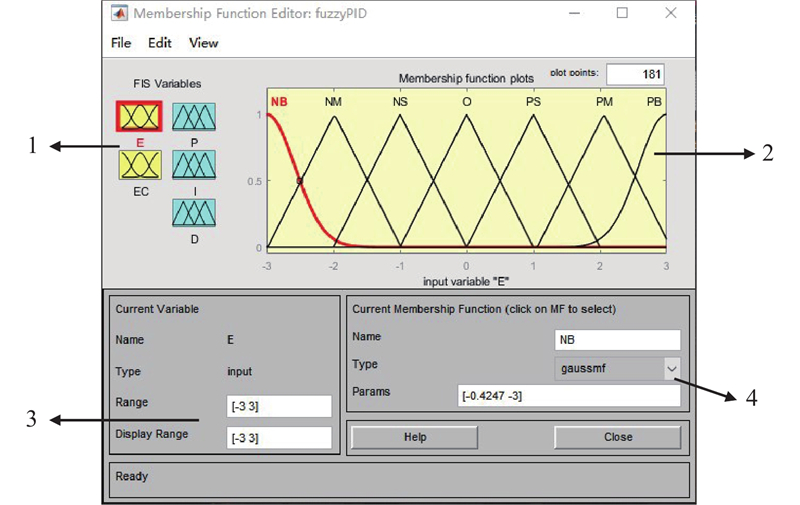
Table 4
Fuzzy rules of $ {\mathit{k}}_{\mathbf{p}} $"
| e | |||||||
| NB | NM | NS | O | PS | PM | PB | |
| NB | PB | PB | PB | PB | PM | PS | O |
| NM | PB | PB | PB | PB | PM | O | O |
| NS | PM | PM | PM | PM | O | PS | NS |
| O | PM | PM | PS | O | NS | NS | NM |
| PS | PS | PS | O | NS | NM | NM | NM |
| PM | PS | O | NS | NM | NM | NM | NB |
| PB | O | O | NM | NM | NM | NB | NB |
Table 5
Input/output (I/O) allocation table"
| 名称 Designation | 地址 Address |
| 启动按钮Start button | I0.0 |
| 停止按钮Stop button | I0.1 |
| 红外传感器Infrared sensor | I0.2 |
| 压力传感器Pressure sensor | I0.3 |
| 激光雷达LiDAR | I0.4 |
| 限位开关Limit switch | I0.5 |
| 伸缩液压缸Telescopic hydraulic cylinder | Q0.0 |
| 1#摆动液压缸1# swing hydraulic cylinder | Q0.1 |
| 2#摆动液压缸2# swing hydraulic cylinder | Q0.2 |
| 夹持液压缸Clamping hydraulic cylinder | Q0.3 |
| 液压马达Hydraulic motor | Q0.4 |

Fig.10
Flow chart of the PLC program"
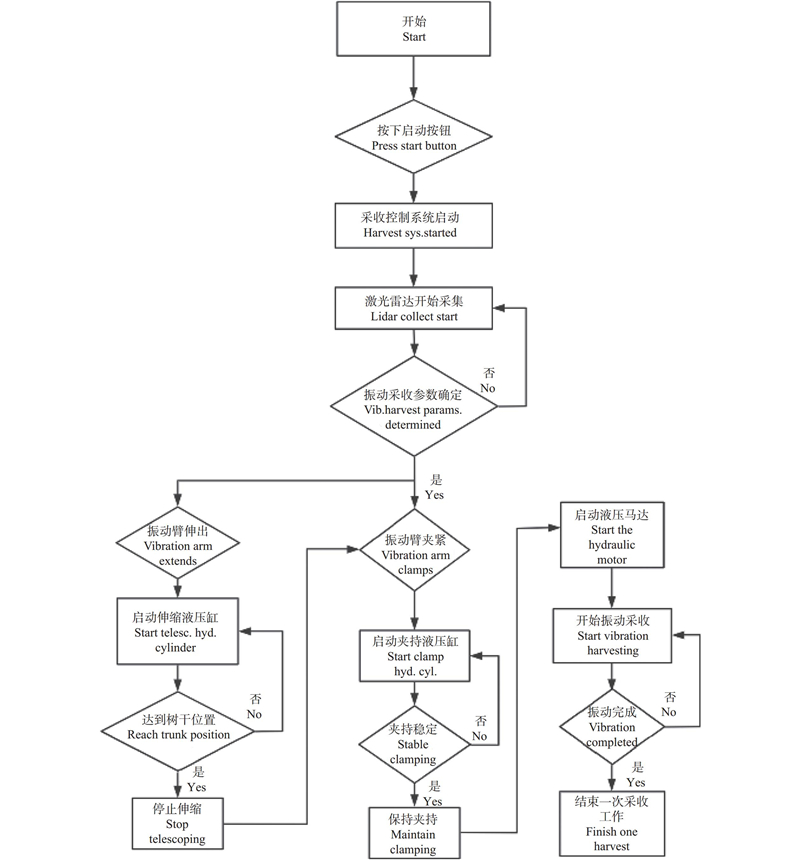

Fig.11
Partial PLC program"
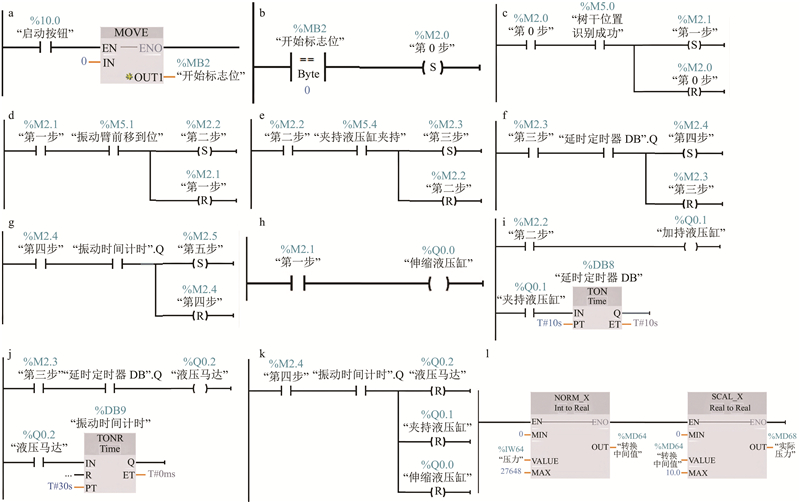

Fig.12
Main screen of monitoring software"
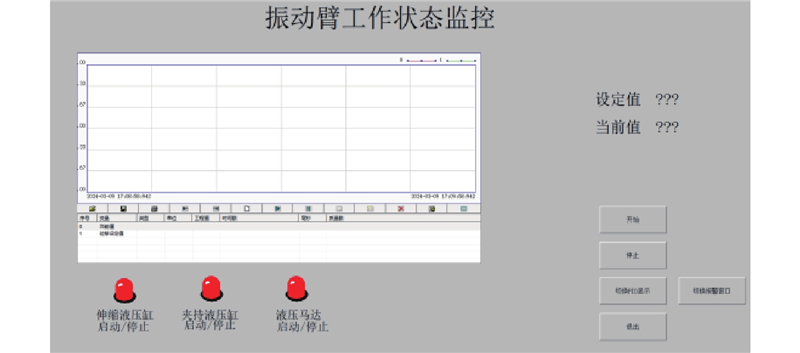
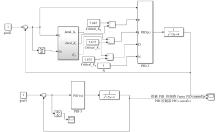
Fig.13
Fuzzy PID simulation block diagram"
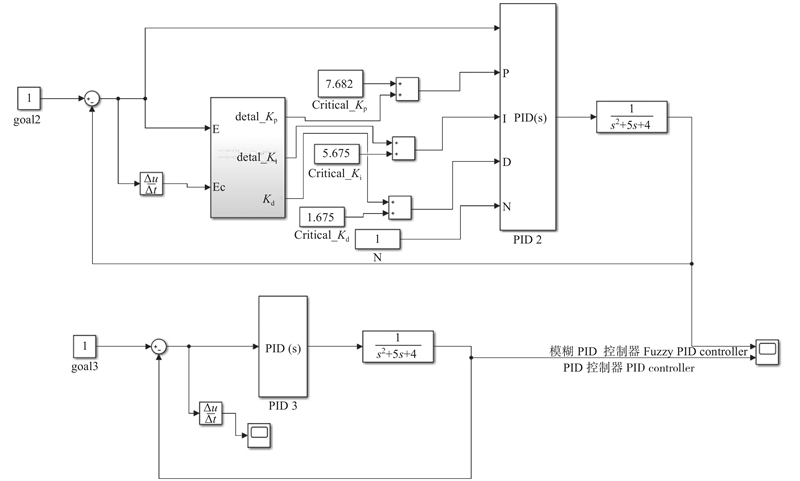

Fig.14
Simulation platform for walnut vibration harvesting control system"
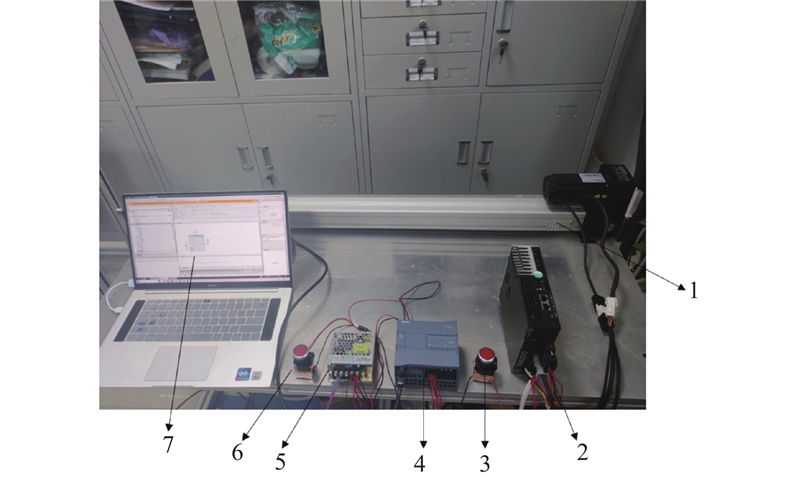

Fig.15
Vibration harvesting of walnuts is underway"


Fig.16
Counting of vibrated fruits"

Fig.17
Unit response of the system under different parameters"
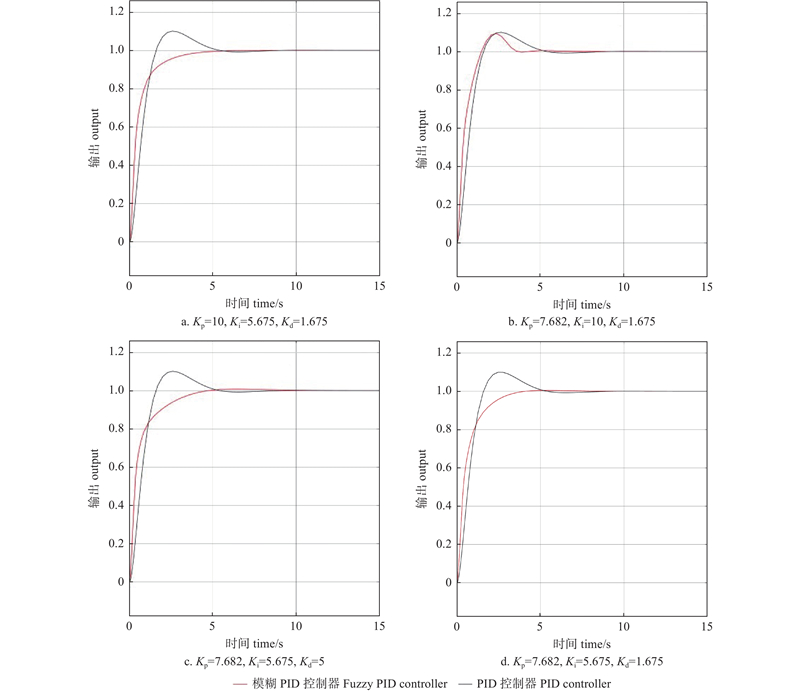
Table 6
Indicators of system unit response"
| 图序 Figure No. | 模糊PID控制器 Fuzzy PID controller | PID控制器 PID controller | |||||
| 上升时间 Rise time/s | 稳定时间 Settling time/s | 超调量 Overshoot (%) | 上升时间 Rise time/s | 稳定时间 Settling time/s | 超调量 Overshoot (%) | ||
| a | 1.52 | 15 | 0 | 0.8 | 5.3 | 0 | |
| b | 1.12 | 7.74 | 9.4 | 1.01 | 9.23 | 22.7 | |
| c | 1.92 | 11.95 | 0.7 | 2.03 | 14.44 | 4.6 | |
| d | 1.68 | 4.13 | 0.4 | 1.63 | 11.05 | 6.9 | |
Table 7
Vibration arm telescopic function test results"
| 试验次数 Number of trials | 距离设定值 Set value of distance/cm | 实际移动距离 平均值 Avg. actual moving distance/cm | 移动时间 Moving time/s | 位移误差 Displacement error(%) |
| 1 | 20 | 19.97 | 2 | 0.15 |
| 2 | 40 | 39.98 | 4 | 0.05 |
| 3 | 60 | 59.97 | 6 | 0.02 |
| 4 | 80 | 79.98 | 8 | 0.03 |
| 5 | 100 | 99.98 | 10 | 0.02 |
Table 8
Results of vibration arm clamping function test"
| 树干直径 Trunk diameter/cm | 设定夹持力 Set clamping force/N | 实际夹持力 平均值 Avg. actual clamping force/N | 平均消耗 时间 Average time consumption/s | 夹持力误差 Clamping force error(%) |
| 15 | 2 500 | 2 432 | 5.2 | 2.72 |
| 16 | 2 600 | 2 555 | 5.2 | 1.73 |
| 17 | 2 700 | 2 648 | 5.3 | 1.93 |
| 18 | 2 800 | 2 742 | 5.5 | 2.01 |
| 19 | 2 900 | 2 846 | 5.5 | 1.86 |
| 20 | 3 000 | 2 964 | 5.6 | 1.20 |
Table 9
System vibration function test results"
| 树干 直径 Trunk diameter/ cm | 设定值 Set value | 实际值 Actual value | 误差 Error | ||||
| 振动频率 Vibration frequency/Hz | 振动 时间 Vibration time/s | 振动频率 Vibration frequency/Hz | 振动 时间 Vibration time/s | 振动频率 Vibration frequency(%) | |||
| 15 | 10 | 15 | 9.7 | 21 | 3.00 | ||
| 16 | 11 | 20 | 10.7 | 27 | 2.72 | ||
| 17 | 12 | 25 | 11.8 | 31 | 1.67 | ||
| 18 | 13 | 35 | 12.7 | 43 | 2.31 | ||
| 19 | 14 | 45 | 13.8 | 53 | 1.43 | ||
| 20 | 15 | 50 | 14.9 | 59 | 0.67 | ||
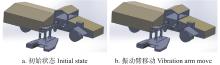
Fig.18
Vibrating arm movement simulation"
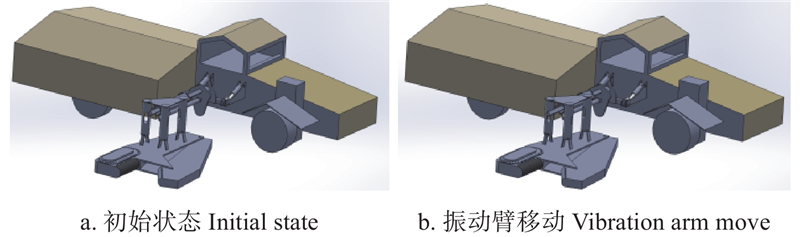

Fig.19
Telescopic hydraulic cylinders are extended"


Fig.20
Clamping hydraulic cylinders are used to clamp the trunk"

Table 10
Results of walnut vibration harvesting"
| 序号 No. | 振落果实 Fruit shaking off | 仍在树上果实 The fruits still on the tree | 采净率 Harvesting efficiency (%) | |||
| 青果 Green fruit/piece | 黑果 Black fruit/piece | 青果 Green fruit/piece | 黑果 Black fruit/piece | |||
| 1 | 55 | 25 | 12 | 6 | 81.6 | |
| 2 | 86 | 50 | 17 | 14 | 81.4 | |
| 3 | 116 | 114 | 10 | 14 | 90.6 | |
| 4 | 82 | 61 | 8 | 4 | 92.3 | |
| 5 | 92 | 62 | 10 | 5 | 91.1 | |
| 6 | 72 | 42 | 17 | 4 | 84.4 | |
| 7 | 82 | 41 | 9 | 2 | 91.8 | |
| 8 | 147 | 59 | 22 | 8 | 87.3 | |
| 9 | 103 | 86 | 24 | 6 | 86.3 | |
| 10 | 176 | 116 | 27 | 7 | 89.6 | |
| 11 | 182 | 92 | 42 | 13 | 83.3 | |
| 12 | 158 | 82 | 19 | 3 | 91.6 | |
| 13 | 154 | 19 | 7 | 5 | 93.5 | |
| 14 | 112 | 35 | 9 | 5 | 91.3 | |
| 15 | 221 | 14 | 8 | 7 | 94 | |
|
宫峥嵘, 王一峰, 王 翰, 等. 核桃矿质营养研究进展. 林业科学, 2021, 57 (1): 178- 190.
doi: 10.11707/j.1001-7488.20210119 |
|
|
Gong Z R, Wang Y F, Wang H, et al. Research progress on mineral nutrition of walnut. Scientia Silvae Sinicae, 2021, 57 (1): 178- 190.
doi: 10.11707/j.1001-7488.20210119 |
|
|
郭关柱, 杨李洋, 罗亚南, 等. 基于无人机平台的气振式核桃采收机设计与试验. 农业机械学报, 2024, 55 (1): 55- 64.
doi: 10.6041/j.issn.1000-1298.2024.01.005 |
|
|
Guo G Z, Yang L Y, Luo Y N, et al. Design and validation of pneumatic vibration walnut picking machine carried by UAV. Transactions of the Chinese Society for Agricultural Machinery, 2024, 55 (1): 55- 64.
doi: 10.6041/j.issn.1000-1298.2024.01.005 |
|
| 黄志鑫, 邢 涛, 邢艳秋. 基于背包激光扫描点云强度的胸径提取方法研究. 遥感技术与应用, 2021, 36 (6): 1284- 1293. | |
| Huang Z X, Xing T, Xing Y Q. Study on extraction method of DBH based on intensity of backpack laser scanning point cloud. Remote Sensing Technology and Application, 2021, 36 (6): 1284- 1293. | |
| 李 斌, 杨星宇, 刘向新, 等. 核桃机械化收获装置研究现状与展望. 中国农机化学报, 2024, 45 (8): 1- 7, 42. | |
| Li B, Yang X Y, Liu X X, et al. Research status and prospect of mechanized harvesting device for walnut. Journal of Chinese Agricultural Mechanization, 2024, 45 (8): 1- 7, 42. | |
| 李启丙. 基于组态软件的PLC控制系统全软件仿真. 机电工程技术, 2021, 50 (4): 135- 137. | |
| Li Q B. Full software simulation of PLC control system based on configuration software. Mechanical & Electrical Engineering Technology, 2021, 50 (4): 135- 137. | |
|
李秋洁, 徐 波, 束义平, 等. LiDAR探测自动对靶喷雾控制系统设计. 农机化研究, 2019, 41 (8): 65- 71.
doi: 10.3969/j.issn.1003-188X.2019.08.011 |
|
|
Li Q J, Xu B, Shu Y P, et al. Design of automatic target spray control system based on LiDAR. Journal of Agricultural Mechanization Research, 2019, 41 (8): 65- 71.
doi: 10.3969/j.issn.1003-188X.2019.08.011 |
|
| 刘 浩, 戴 宁. 基于树干振动原理的核桃采收机设计. 机械制造与自动化, 2023, 52 (1): 226- 229. | |
| Liu H, Dai N. Design of walnut harvester based on trunk vibration. Machine Building & Automation, 2023, 52 (1): 226- 229. | |
|
麻丽明, 樊新乾. 基于组态王生产线故障报警监控系统的设计. 机电工程技术, 2022, 51 (1): 139- 142.
doi: 10.3969/j.issn.1009-9492.2022.01.035 |
|
|
Ma L M, Fan X Q. Design of fault alarm monitoring system based on KingView production line. Mechanical & Electrical Engineering Technology, 2022, 51 (1): 139- 142.
doi: 10.3969/j.issn.1009-9492.2022.01.035 |
|
| 麻卫峰, 王金亮, 麻源源, 等. 改进K均值聚类的点云林木胸径提取. 测绘科学, 2021, 46 (9): 122- 129. | |
| Ma W F, Wang J L, Ma Y Y, et al. An improved K-means clustering method for DBH extraction from point cloud. Science of Surveying and Mapping, 2021, 46 (9): 122- 129. | |
| 乔园园, 牛长河, 孟详金, 等. 牵引式林果振动采收机的设计与田间试验. 新疆农业科学, 2015, 52 (3): 528- 534. | |
| Qiao Y Y, Niu C H, Meng X J, et al. Design of traction type fruit harvest machine and its experimental research in fields. Xinjiang Agricultural Sciences, 2015, 52 (3): 528- 534. | |
| 茹 煜, 范高鸣, 徐国鹏, 等. 核桃振动采收研究现状与发展趋势. 林业工程学报, 2024, 9 (1): 21- 31. | |
| Ru Y, Fan G M, Xu G P, et al. Research status and development trend of walnut vibration harvesting. Journal of Forestry Engineering, 2024, 9 (1): 21- 31. | |
| 石昌玉, 丁禹程, 曲 文, 等. 定制化被动式木门 窗材柔性分类智能控制系统设计. 森林工程, 2024, 40 (3): 162- 169. | |
| Shi C Y, Ding Y C, Qu W, et al. Design of customized passive wood door and window material flexible classification intelligent control system. Forest Engineering, 2024, 40 (3): 162- 169. | |
|
师素文, 张广红, 吴爱国. 基于PLC的万吨液压机控制系统设计. 制造技术与机床, 2005, (9): 34- 37.
doi: 10.3969/j.issn.1005-2402.2005.09.011 |
|
|
Shi S W, Zhang G H, Wu A G. Design of PLC-based control system for 10 000 t hydraulic press. Manufacturing Technology & Machine Tool, 2005, (9): 34- 37.
doi: 10.3969/j.issn.1005-2402.2005.09.011 |
|
| 束义平, 李秋洁, 周宏平, 等. 基于激光雷达探测的变量喷雾控制系统设计. 林业工程学报, 2020, 5 (1): 139- 147. | |
| Shu Y P, Li Q J, Zhou H P, et al. Design of variable rate spray control system based on LiDAR detection. Journal of Forestry Engineering, 2020, 5 (1): 139- 147. | |
|
王长勤, 许林云, 周宏平, 等. 基于PLC和MCGS的偏心式林果振动采收机控制系统设计. 农机化研究, 2013, 35 (3): 79- 83.
doi: 10.3969/j.issn.1003-188X.2013.03.018 |
|
|
Wang C Q, Xu L Y, Zhou H P, et al. Design of control system for eccentric-type forest-fruit vibration harvesting machine based on PLC and MCGS software. Journal of Agricultural Mechanization Research, 2013, 35 (3): 79- 83.
doi: 10.3969/j.issn.1003-188X.2013.03.018 |
|
|
夏小强. 基于PLC的采摘车控制系统设计. 工业控制计算机, 2023, 36 (12): 152- 153.
doi: 10.3969/j.issn.1001-182X.2023.12.063 |
|
|
Xia X Q. Design of PLC based control system for picking trucks. Industrial Control Computer, 2023, 36 (12): 152- 153.
doi: 10.3969/j.issn.1001-182X.2023.12.063 |
|
| 徐景中, 贾潇冉, 程昭文. 基于分层聚合的行道树点云树干检测方法. 激光与光电子学进展, 2023, 60 (12): 445- 452. | |
| Xu J Z, Jia X R, Cheng Z W. Detection method of street tree trunks from point clouds based on multilayer aggregation. Laser & Optoelectronics Progress, 2023, 60 (12): 445- 452. | |
| 姚宗旭, 张维国, 郭 帅, 等. 基于PLC智能控制的某球团厂放料测试研究. 有色设备, 2021, 35 (5): 29- 32. | |
| Yao Z X, Zhang W G, Guo S, et al. Research on the discharging test of a pelletizing plant based on PLC intelligent control. Nonferrous Metallurgical Equipment, 2021, 35 (5): 29- 32. | |
|
叶青青. 一种基于PLC控制的机械手液压系统设计. 电子制作, 2023, 31 (14): 17- 20.
doi: 10.3969/j.issn.1006-5059.2023.14.005 |
|
|
Ye Q Q. Design of a manipulator hydraulic system based on PLC control. Practical Electronics, 2023, 31 (14): 17- 20.
doi: 10.3969/j.issn.1006-5059.2023.14.005 |
|
| 赵艳莉, 赵 倩, 李志强. 基于PLC的山核桃破壳自动化生产线控制系统研究. 食品与机械, 2023, 39 (1): 111- 115, 194. | |
| Zhao Y L, Zhao Q, Li Z Q. Research on control system of Carya cathayensis shell breaking automatic production line based on PLC. Food & Machinery, 2023, 39 (1): 111- 115, 194. | |
| 祝前峰, 陆荣鉴, 刘 彬, 等. 核桃采摘机械研究现状与发展趋势. 林业和草原机械, 2021, 2 (1): 45- 53. | |
| Zhu Q F, Lu R J, Liu B, et al. Research status and development trend of walnut picking machinery. Forestry and Grassland Machinery, 2021, 2 (1): 45- 53. | |
|
朱世超, 王骋程, 王 超, 等. 基于支持向量聚类和模糊粗糙集的交通流数据修复方法. 森林工程, 2023, 39 (1): 157- 165.
doi: 10.3969/j.issn.1006-8023.2023.01.019 |
|
|
Zhu S C, Wang C C, Wang C, et al. Missing traffic flow data imputation based on support vector clustering and fuzzy rough set. Forest Engineering, 2023, 39 (1): 157- 165.
doi: 10.3969/j.issn.1006-8023.2023.01.019 |
|
|
朱兆廷, 孙玉军, 梁瑞婷, 等. 基于树冠和竞争因子的杉木胸径估测. 北京林业大学学报, 2023, 45 (9): 42- 51.
doi: 10.12171/j.1000-1522.20230011 |
|
|
Zhu Z T, Sun Y J, Liang R T, et al. Estimating DBH of Cunninghamia lanceolata based on crown and competition factors. Journal of Beijing Forestry University, 2023, 45 (9): 42- 51.
doi: 10.12171/j.1000-1522.20230011 |
|
|
Cao J L, Bai X P, Xu D C, et al. Experiment and analysis on walnut (Juglans regia L. ) shedding force based on low-frequency vibration response. Industrial Crops and Products, 2023, 204, 117242.
doi: 10.1016/j.indcrop.2023.117242 |
|
|
Castro-Garcia S, Aragon-Rodriguez F, Sola-Guirado R R, et al. Vibration monitoring of the mechanical harvesting of Citrus to improve fruit detachment efficiency. Sensors, 2019, 19 (8): 1760.
doi: 10.3390/s19081760 |
|
|
Du X Q, Chen K Z, Ma Z H, et al. Design, construction, and evaluation of a three-dimensional vibratory harvester for tree fruit. Applied Engineering in Agriculture, 2020, 36 (2): 221- 231.
doi: 10.13031/aea.13478 |
|
|
Du X Q, Jiang F, Li S T, et al. Design and experiment of vibratory harvesting mechanism for Chinese hickory nuts based on orthogonal eccentric masses. Computers and Electronics in Agriculture, 2019, 156, 178- 186.
doi: 10.1016/j.compag.2018.11.027 |
|
| Du X Q, Wu C Y, He L Y, et al. Dynamic characteristics of dwarf Chinese hickory trees under impact excitations for mechanical fruit harvesting. International Journal of Agricultural and Biological Engineering, 2015, 8 (1): 17- 25. | |
|
Jiao H B, Luo J M, Tang A F, et al. Design and testing of the double-symmetric eccentric exciter for fruit tree vibration harvest. Agriculture, 2024, 14 (4): 570.
doi: 10.3390/agriculture14040570 |
|
|
Liu C Y, Xu D C, Cao J L. Vibration response of walnuts under vibration harvesting. Agronomy, 2023, 13 (2): 461.
doi: 10.3390/agronomy13020461 |
|
|
Luo L P, Zhai Q P, Su Y J, et al. Simple method for direct crown base height estimation of individual conifer trees using airborne LiDAR data. Optics Express, 2018, 26 (10): A562- A578.
doi: 10.1364/OE.26.00A562 |
|
| Na L. 2019. Application of siemens Smart200 and S7-1200 PLC complex instructions in industrial automation. Proceedings of 2019 International Conference on Information Science, Medical and Health Informatics(ISMHI 2019), Yinchuan College of China University of Mining and Technology, 6. | |
|
Shaheed B N, Selman N H. Design and implementation of a control system for a steel plate cutting production line using programmable logic controller. International Journal of Electrical and Computer Engineering (IJECE), 2023, 13 (4): 3969- 3976.
doi: 10.11591/ijece.v13i4.pp3969-3976 |
| [1] | Yu Ru,Gaoming Fan,Linyun Xu,Haifeng Zhang,Hongping Zhou,Minghong Shi,Yanyan Wang,Wangbin Cui,Guopeng Xu. Design and Vibration Performance of a Flexible Rocker-Arm Walnut Vibrating Harvester [J]. Scientia Silvae Sinicae, 2025, 61(4): 180-195. |
| [2] | Hou Xiaopeng, Zhang Guoliang, Wang Junfeng, Miao Hu, Liu Xinyu, Zhou Yucheng. Driving Control System Design of Continuous Flat Press Based on SIMOTION D435 [J]. Scientia Silvae Sinicae, 2018, 54(5): 116-126. |
| [3] | Liu Xinyu;Hou Xiaopeng;Miao Hu;Zhou Yucheng. Development of Control System for Formaldehyde Testing Chamber [J]. , 2013, 49(1): 185-188. |
| [4] | Zhou Xinnian;Wu Zhilong;Zhou Chengjun;Feng Jianxiang. Improvement Design of YP1.0-A Remote Control Carriage and Remote Control System [J]. Scientia Silvae Sinicae, 2012, 48(2): 144-149. |
| [5] | Hu Tianxiang;Zheng Jiaqiang;Zhou Hongping;Cong Jinghua. Method on Improving Segmentation Processing Speed of Dynamic Tree Image [J]. Scientia Silvae Sinicae, 2009, 12(6): 62-67. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||