
Scientia Silvae Sinicae ›› 2022, Vol. 58 ›› Issue (11): 96-107.doi: 10.11707/j.1001-7488.20221109
• Research papers • Previous Articles Next Articles
Hongyu Huang,Yubo Luo,Liyu Tang*,Xiaoxiao Li,Wei Peng,Chongcheng Chen
Received:2021-07-22
Online:2022-11-25
Published:2023-03-08
Contact:
Liyu Tang
CLC Number:
Hongyu Huang,Yubo Luo,Liyu Tang,Xiaoxiao Li,Wei Peng,Chongcheng Chen. Registration of Point Cloud from Different Platforms in Forested Area Based on Tree Position Features[J]. Scientia Silvae Sinicae, 2022, 58(11): 96-107.
Table 1
Field conditions of the two plots"
| 样地 Plot | 郁闭度 Canopy density(%) | 主要树种 Main species | 树高 Tree height/ m | 树木间距 Distance between trees/m | 坡度 Slope/(°) | 点云类型 Point cloud type |
| 样地1 Plot 1 | 60 | 大叶桉Eucalyptus robusta | 15~20 | 1~2 | 20 | ALS/TLS/MLS |
| 样地2 Plot 2 | 40 | 罗汉松、桂花 Podocarpus macrophyllus,Osmanthus sp. | 5~10 | 1~2 | 20 | UAV-IPC/TLS |
Table 2
LiDAR systems parameters"
| 参数Parameters | Riegl VZ-400 | LiBackpack 50 | 蜂鸟无人机激光雷达 Genius UAV LiDAR |
| 最大测量距离 Max. range/m | 400(目标反射率Target reflectivity ρ≥20%) | 100 | 200(ρ=20%) |
| 回波数 Number of echoes | 多次 More than once | 双回波 Double echo | 双回波 Double echo |
| 精度 Precision/m | 0.005 | 0.05 | 0.1 |
| 激光波长 Wavelength/×10-9 m | 1 064 | 903 | 905 |
| 视场角(水平×垂直) FOV(horizontal×vertical) | 360°×100° | 360°×30° | 360°×24° |
| 平均点云密度 Point density/m-2 | 2 000 | 300 | 90 |
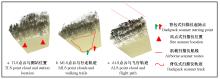
Fig.1
Schematic diagram of point cloud acquisition methods utilized in plot 1"
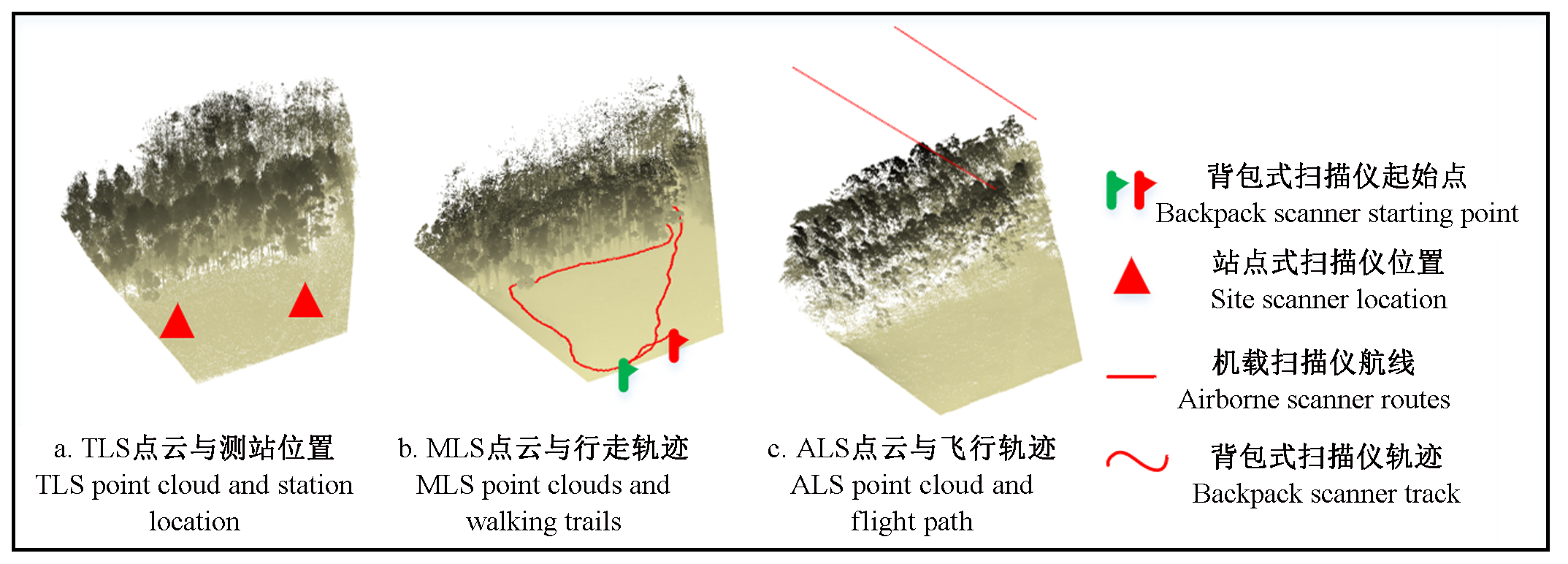

Fig.2
Flowchart of 3D point cloud registration in forested areas"
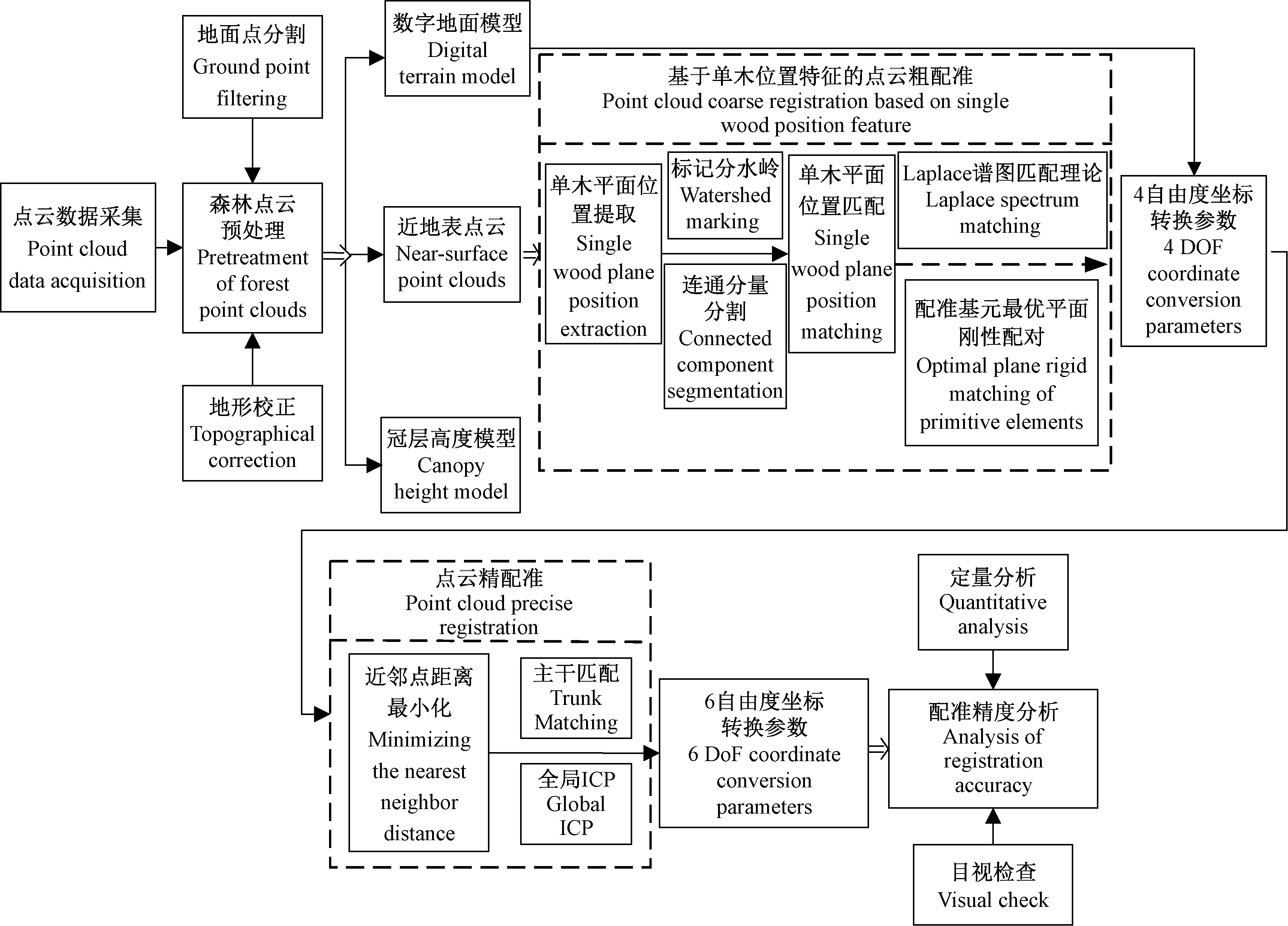
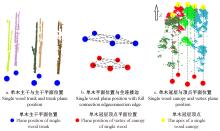
Fig.3
Schematic diagram of obtaining 2D tree positions from either trunk or canopy top locations"

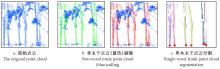
Fig.4
Schematic diagram of trunk cloud segmentation and trunk position from the ground-based point cloud"
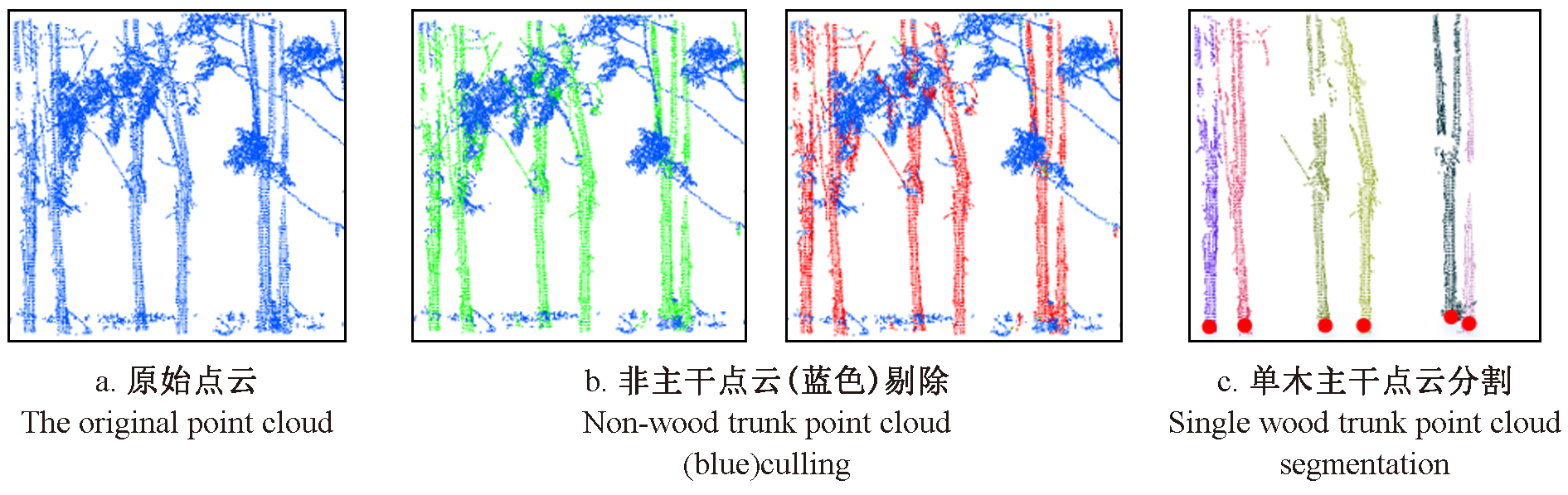

Fig.5
Schematic diagram of 2D tree positions and their canopy boundaries"
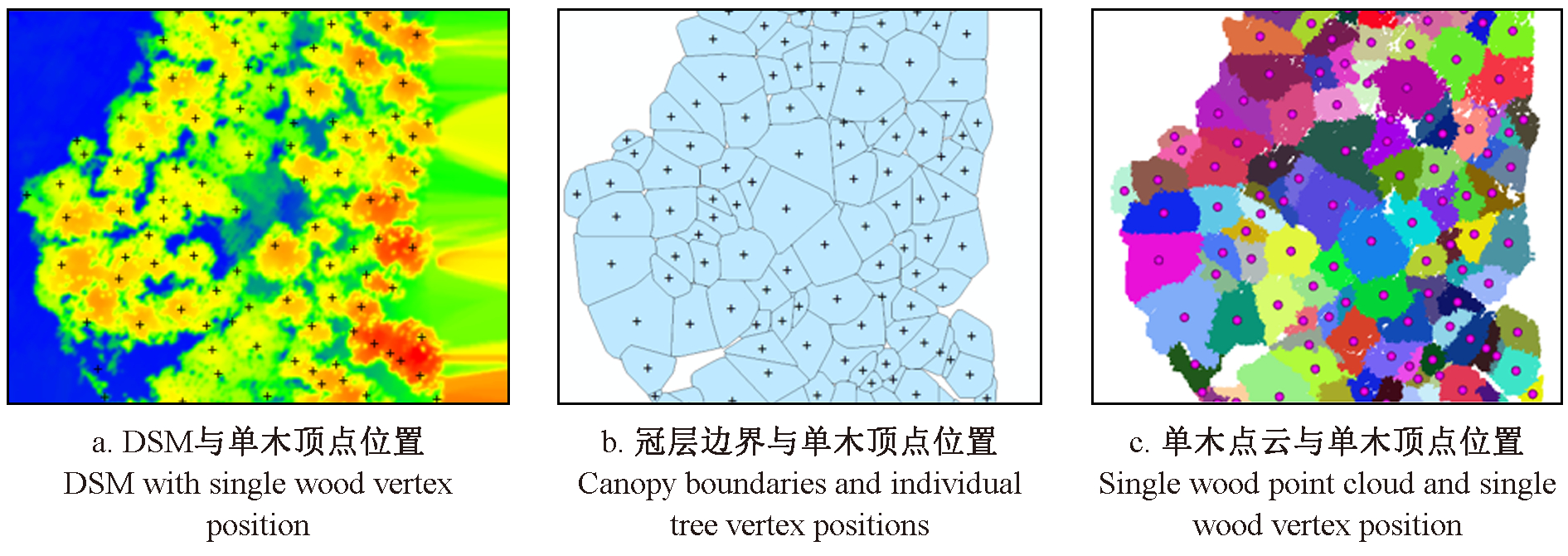

Fig.6
Registration primitives S1 and S2 and their fully connected graphs"
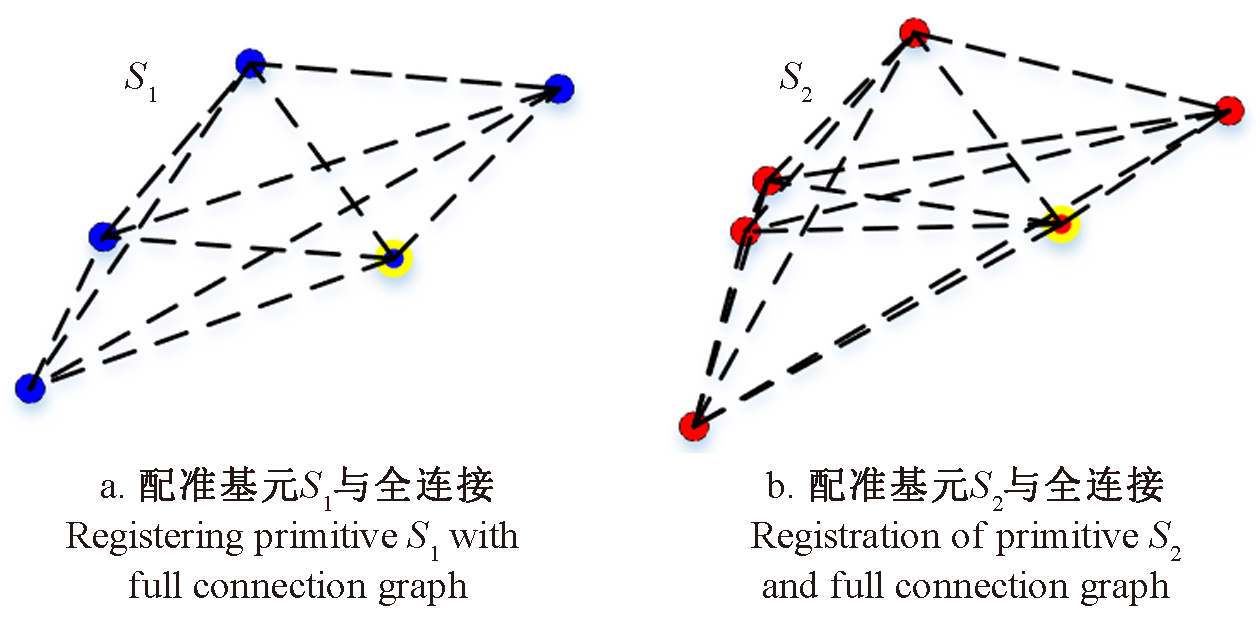
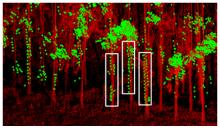
Fig.7
Schematic diagram of point cloud distribution on the tree trunks Red points are from the side view point cloud and greens are from the top view point cloud."
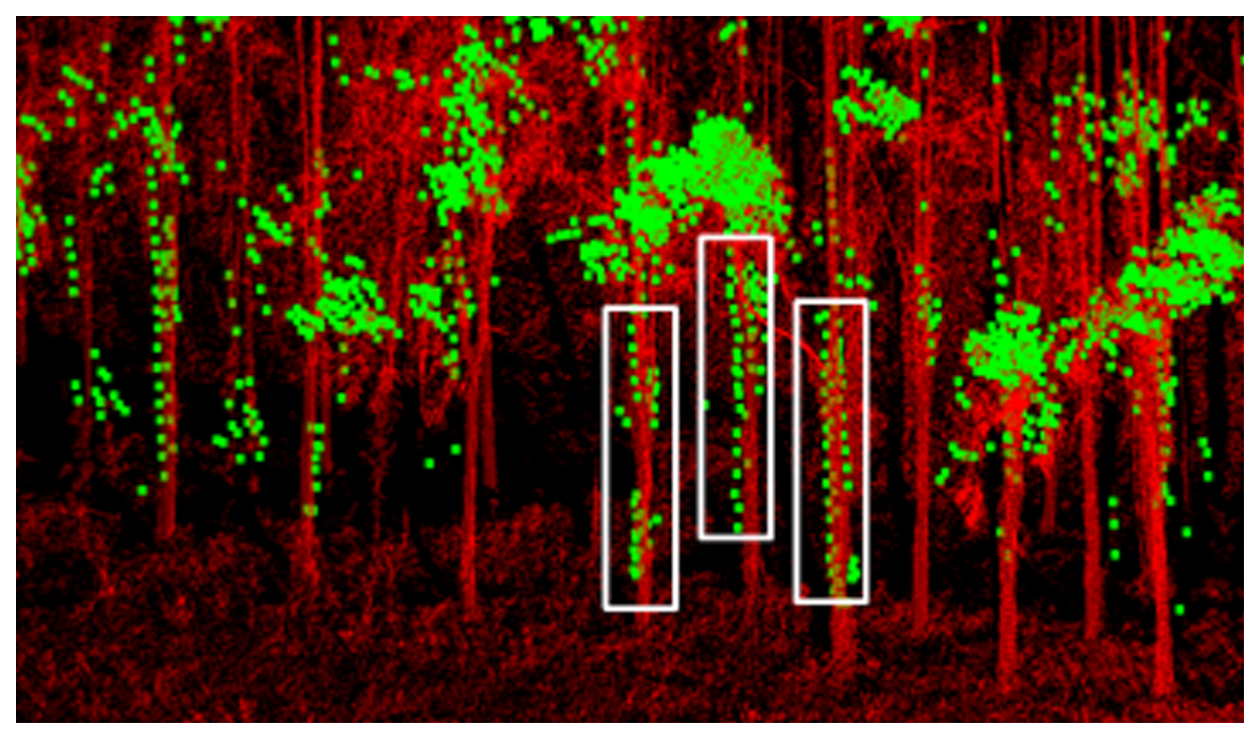

Fig.8
Schematic diagram of trunk location extraction and trunk-to-trunk matching"
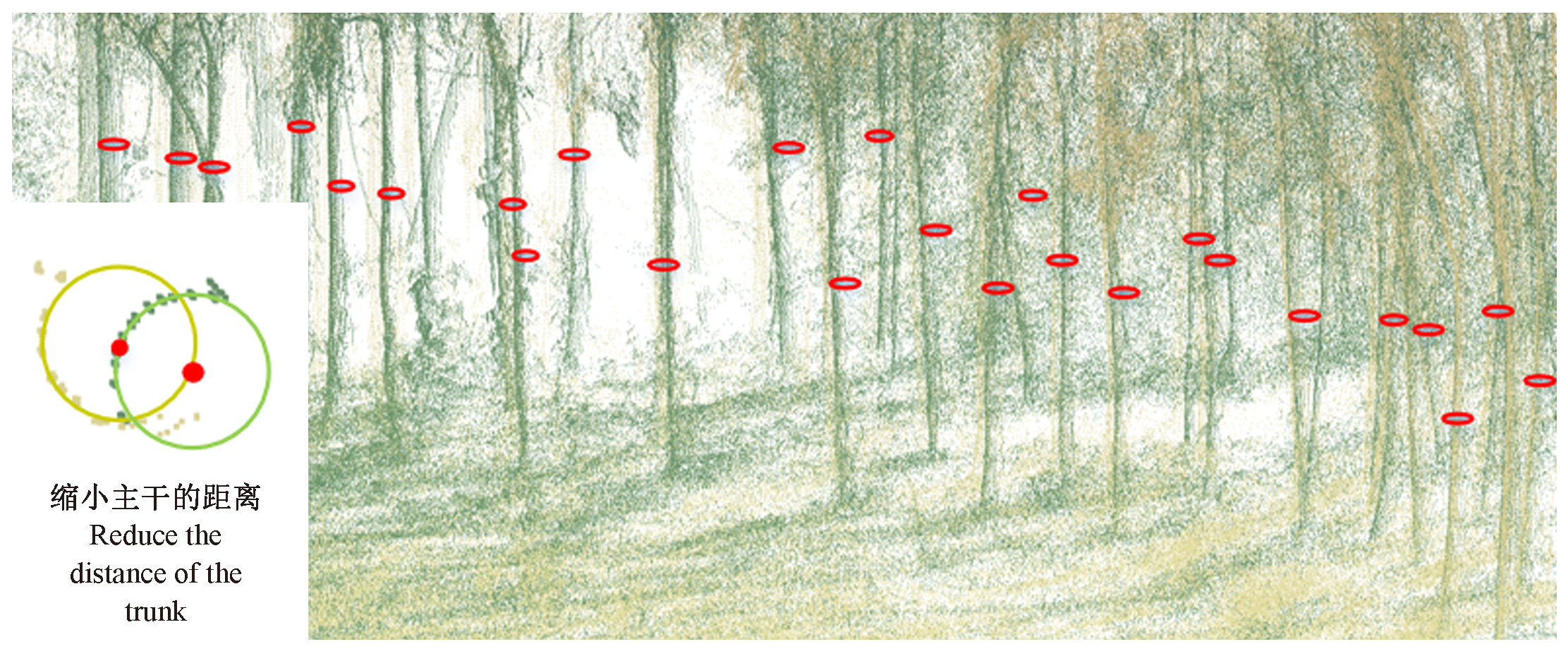
Table 3
Statistics of tree detection accuracy based on point cloud data"
| 样地 Plot | 点云类型 Point cloud type | 总数 Sum | 错检数 Number of fault detection | 漏检数 Number of the missed detection | 错检率 Fault detection rate(%) | 漏检率 Missed detection rate(%) |
| 样地1 Plot 1 | TLS1 | 148 | 5 | 15 | 3.4 | 9.5 |
| TLS2 | 128 | 1 | 20 | 0.8 | 13.6 | |
| MLS | 145 | 0 | 28 | 0 | 16.2 | |
| ALS | 130 | 27 | 36 | 20.8 | 25.9 | |
| 样地2 Plot 2 | TLS1 | 157 | 1 | 4 | 0.6 | 2.5 |
| TLS2 | 107 | 1 | 9 | 0.9 | 7.8 | |
| TLS3 | 165 | 4 | 16 | 2.4 | 9.0 | |
| UAV-IPC | 682 | 90 | 39 | 13.2 | 6.2 |
Fig.9
Diagram of individual tree locations in 2 plots"
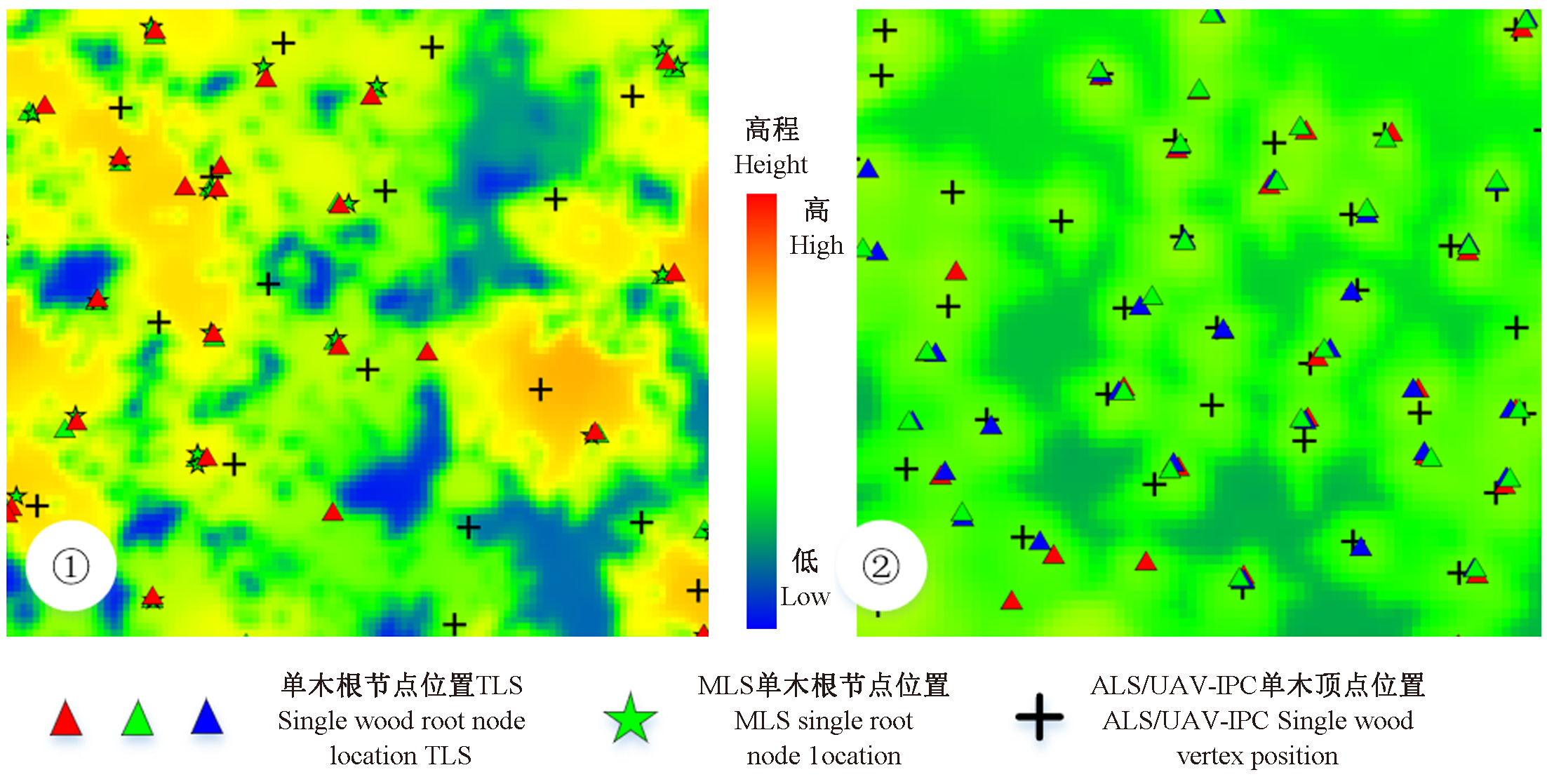
Table 4
Registration accuracy results of point cloud in forested area"
| 样地 Plot | 视角 View angle | 站位 Station | 传感器 Sensors | 粗配准 Coarse registration/m | 全局ICP Global ICP/m | 主干点云匹配 Backbone point cloud matching/m |
| 样地1 Plot 1 | 侧视/俯视 Side/top view | 1 | ALS-MLS | 1.10 | 0.83 | 0.32 |
| 2 | ALS-TLS1 | 1.43 | 0.66 | 0.34 | ||
| 3 | ALS-TLS2 | 2.77 | 0.48 | 0.41 | ||
| 均值Mean | 1.77 | 0.66 | 0.36 | |||
| 侧视/侧视 Side/side view | 1 | TLS1-TLS2 | 0.35 | 0.09 | ||
| 2 | MLS-TLS1 | 0.13 | 0.07 | |||
| 3 | MLS-TLS2 | 0.25 | 0.16 | |||
| 均值Mean | 0.24 | 0.11 | ||||
| 样地2 Plot 2 | 侧视/俯视 Top/top view | 4 | UAV-TLS1 | 0.30 | 0.27 | 0.28 |
| 5 | UAV-TLS2 | 0.46 | 0.17 | 0.25 | ||
| 6 | UAV-TLS3 | 0.38 | 0.17 | 0.21 | ||
| 均值Mean | 0.38 | 0.24 | 0.25 | |||
| 侧视/侧视 Side/side view | 4 | TLS1-TLS2 | 0.11 | 0.03 | ||
| 5 | TLS2-TLS3 | 0.36 | 0.07 | |||
| 6 | TLS1-TLS3 | 0.24 | 0.09 | |||
| 均值Mean | 0.24 | 0.06 |
Table 5
Comparative analysis results of coordinate transformation parameter"
| 样地 Plot | 视角 View angle | 站位 Station | 传感器 Sensors | x差值 x difference/m | y差值 y difference/m | z差值 z difference/m | 角度x差值 Angle x difference/(°) | 角度y差值 Angle y difference/(°) | 角度z差值 Angle z difference/(°) |
| 样地1 Plot 1 | 侧视/俯视 Side/top view | 1 | ALS-MLS | 0.15 | 1.18 | 3.74 | 2.01 | 6.21 | 0.81 |
| 2 | ALS-TLS1 | 0.30 | 0.07 | 0.33 | 0.06 | 0.96 | 0.80 | ||
| 3 | ALS-TLS2 | 0.07 | 0.23 | 0.50 | 0.00 | 0.84 | 0.17 | ||
| 均值Mean | 0.17 | 0.49 | 1.52 | 0.69 | 2.67 | 0.59 | |||
| 侧视/侧视 Side/side view | 1 | TLS1-TLS2 | 0.00 | 0.03 | 0.23 | 0.47 | 0.83 | 0.13 | |
| 2 | MLS-TLS1 | 0.04 | 0.10 | 1.31 | 0.32 | 3.52 | 0.25 | ||
| 3 | MLS-TLS2 | 0.01 | 0.07 | 0.60 | 0.20 | 1.60 | 0.13 | ||
| 均值Mean | 0.02 | 0.07 | 0.71 | 0.33 | 1.98 | 0.17 | |||
| 样地2 Plot 2 | 侧视/俯视 Top/top view | 4 | UAV-TLS1 | 0.10 | 0.03 | 0.25 | 0.11 | 0.50 | 0.13 |
| 5 | UAV-TLS2 | 0.22 | 0.08 | 0.24 | 0.81 | 0.13 | 0.16 | ||
| 6 | UAV-TLS3 | 0.13 | 0.00 | 0.22 | 0.11 | 0.69 | 0.44 | ||
| 均值Mean | 0.15 | 0.04 | 0.24 | 0.34 | 0.44 | 0.24 | |||
| 侧视/侧视 Side/side view | 4 | TLS1-TLS2 | 0.01 | 0.02 | 0.09 | 0.57 | 0.30 | 0.04 | |
| 5 | TLS2-TLS3 | 0.04 | 0.01 | 0.21 | 0.46 | 0.30 | 0.08 | ||
| 6 | TLS1-TLS3 | 0.01 | 0.02 | 0.14 | 0.35 | 0.09 | 0.02 | ||
| 均值Mean | 0.02 | 0.01 | 0.15 | 0.46 | 0.23 | 0.05 |

Fig.10
A slice of trunk points after coarse registration (top row) and fine registration (second row)"
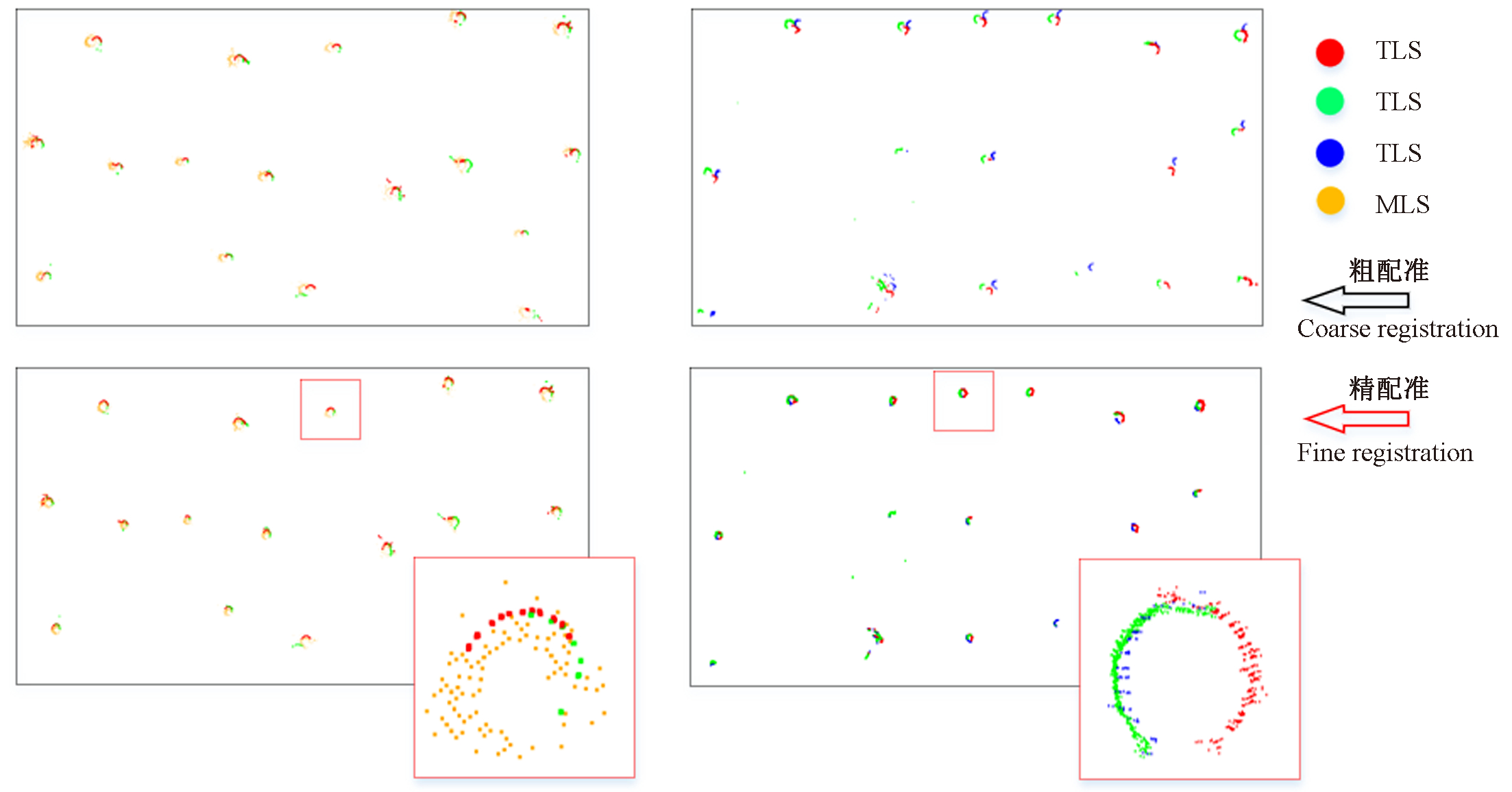

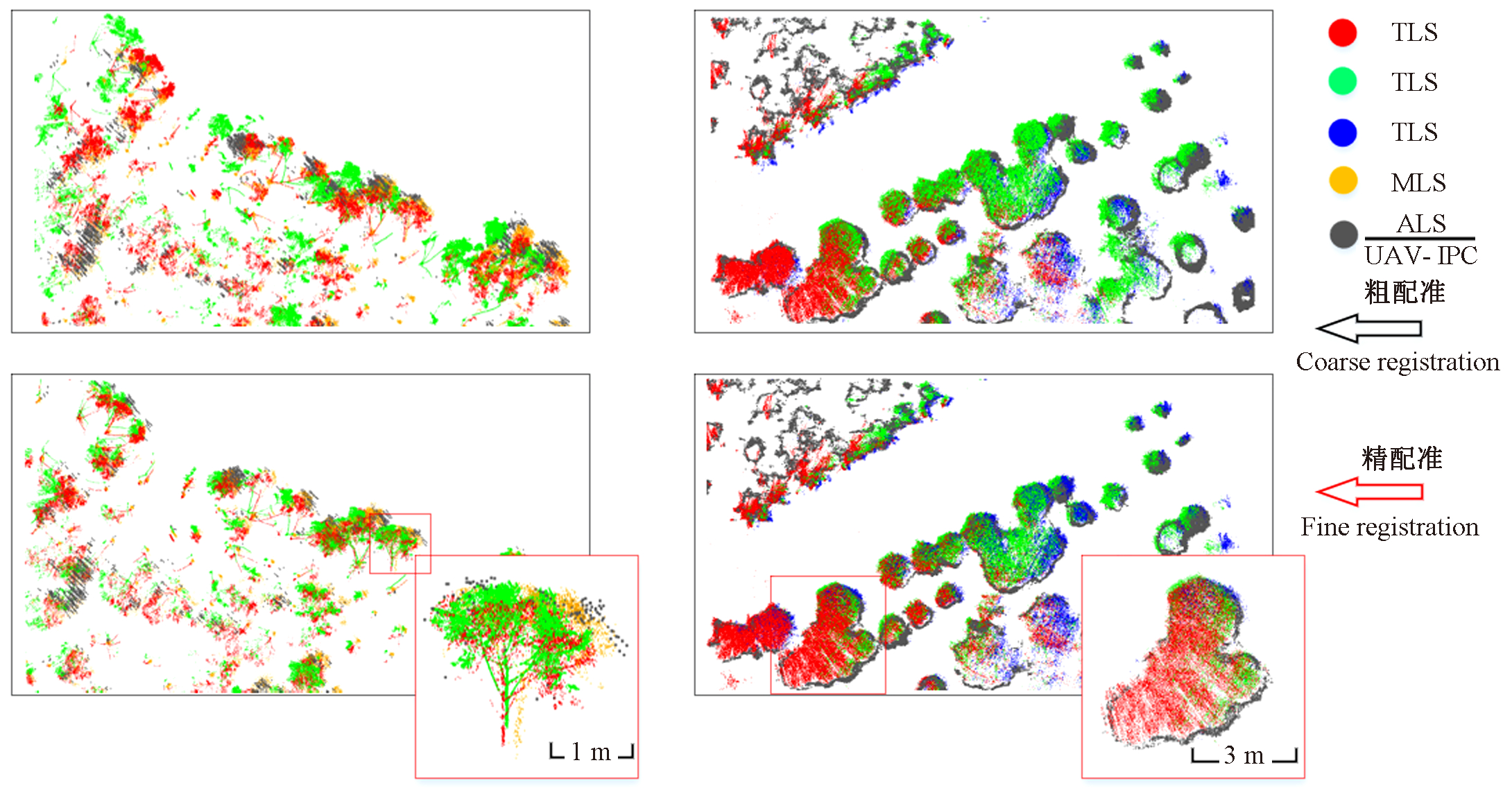
Fig.11
Projections of canopy layers after coarse registration (top row) and fine registration (lower row)"
| 陈崇成, 李旭, 黄洪宇. 基于无人机影像匹配点云的苗圃单木冠层三维分割. 农业机械学报, 2018, 49 (2): 149- 155.149-155, 206 | |
| Chen C C , Li X , Huang H Y . 3D segmentation of individual tree canopy in forest nursery based on drone image-matching point cloud. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49 (2): 149- 155.149-155, 206 | |
| 陈驰, 杨必胜, 田茂, 等. 车载MMS激光点云与序列全景影像自动配准方法. 测绘学报, 2018, 47 (2): 215- 224. | |
| Chen C , Yang B S , Tian M , et al. Automatic registration of vehicle-borne mobile mapping laser point cloud and sequent panoramas. Acta Geodaetica et Cartographica Sinica, 2018, 47 (2): 215- 224. | |
| 刘鲁霞, 庞勇, 李增元. 基于地基激光雷达的亚热带森林单木胸径与树高提取. 林业科学, 2016, 52 (2): 26- 37. | |
| Liu L X , Pang Y , Li Z Y . Individual tree DBH and height estimation using terrestrial laser scanning(TLS) in A subtropical forest. Scientia Silvae Sinicae, 2016, 52 (2): 26- 37. | |
| 刘清旺, 李世明, 李增元, 等. 无人机激光雷达与摄影测量林业应用研究进展. 林业科学, 2017, 53 (7): 134- 148. | |
| Liu Q W , Li S M , Li Z Y , et al. Review on the applications of UAV-based LiDAR and photogrammetry in forestry. Scientia Silvae Sinicae, 2017, 53 (7): 134- 148. | |
|
倪文俭, 过志峰, 孙国清, 等. 基于地基激光雷达数据的单木结构参数提取研究. 高技术通讯, 2010, 20 (2): 191- 198.
doi: 10.3772/j.issn.1002-0470.2010.02.015 |
|
|
Ni W J , Guo Z F , Sun G Q , et al. Research on extraction of tree structure parameters from terrestrial laser scanner data. Chinese High Technology Letters, 2010, 20 (2): 191- 198.
doi: 10.3772/j.issn.1002-0470.2010.02.015 |
|
| 王年, 周梅菊, 张江, 等. 基于最小生成树的LAPLACE谱图像匹配算法. 系统仿真学报, 2009, 21 (17): 5481- 5485. | |
| Wang N , Zhou M J , Zhang J , et al. Laplacian spectrum image matching algorithm based on minimum spanning tree. Journal of System Simulation, 2009, 21 (17): 5481- 5485. | |
| Cabo C , del Pozo S , Rodríguez-Gonzálvez P , et al. Comparing terrestrial laser scanning (TLS) and wearable laser scanning (WLS) for individual tree modeling at plot level. Remote Sensing, 2018a, 10 (4): 540. | |
| Cabo C , Ordóñez C , López-Sánchez C A , et al. Automatic dendrometry: tree detection, tree height and diameter estimation using terrestrial laser scanning. International Journal of Applied Earth Observation and Geoinformation, 2018b, 69, 164- 174. | |
| Caelli T , Kosinov S . An eigenspace projection clustering method for inexact graph matching. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2004, 26 (4): 515- 519. | |
| Fritz A, Weinacker H, Koch B. 2011. A method for linking TLS- and ALS-derived trees. Silvilaser, Hobart: SilviLaser. | |
| Gatziolis D. 2012. Advancements in LiDAR-based registration of FIA field plots//Moving from status to trends: forest inventory and analysis (FIA) symposium. Baltimore: U. S. Department of Agriculture, Forest Service, Northern Research Station. | |
| Hauglin M , Lien V , Næsset E , et al. Geo-referencing forest field plots by co-registration of terrestrial and airborne laser scanning data. International Journal of Remote Sensing, 2014, 35 (9): 3135- 3149. | |
| Hilker T , Coops N C , Culvenor D S , et al. A simple technique for co-registration of terrestrial LiDAR observations for forestry applications. Remote Sensing Letters, 2012, 3 (3): 239- 247. | |
| Holmgren J, Tulldahl H M, Nordlöf J, et al. 2017. Estimation of tree position and stem diameter using simultaneous localization and mapping with data from a backpack-mounted laser scanner. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XLⅡ-3/W3: 59-63. | |
| Jing L H , Hu B X , Li J L , et al. Automated delineation of individual tree crowns from LiDAR data by multi-scale analysis and segmentation. Photogrammetric Engineering and Remote Sensing, 2012, 78 (12): 1275- 1284. | |
| Merris R . Laplacian matrices of graphs: a survey. Linear Algebra and Its Applications, 1994, 197/198, 143- 176. | |
| Miettinen M, Ohman M, Visala A, et al. 2007. Simultaneous localization and mapping for forest harvesters. Proceedings 2007 IEEE International Conference on Robotics and Automation. Rome, Italy. IEEE, 517-522. | |
| Newnham G J , Armston J D , Calders K , et al. Terrestrial laser scanning for plot-scale forest measurement. Current Forestry Reports, 2015, 1 (4): 239- 251. | |
| Olofsson K, Lindberg E, Holmgren J, et al. 2008. A method for linking field-surveyed and aerial-detected single trees using cross correlation of position images and the optimization of weighted tree list graphs. International Conference on Silvilaser, Edinburgh: SilviLaser. | |
| Paris C , Kelbe D , van Aardt J , et al. A novel automatic method for the fusion of ALS and TLS LiDAR data for robust assessment of tree crown structure. IEEE Transactions on Geoscience and Remote Sensing, 2017, 55 (7): 3679- 3693. | |
| Polewski P, Erickson A, Yao W, et al. 2016. Object-based coregistration of terrestrial photogrammetric and als point clouds in forested areas. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Ⅲ-3: 347-354. | |
| Polewski P , Yao W , Cao L , et al. Marker-free coregistration of UAV and backpack LiDAR point clouds in forested areas. ISPRS Journal of Photogrammetry and Remote Sensing, 2019, 147, 307- 318. | |
| Shapiro L S , Brady J M . Feature-based correspondence: an eigenvector approach. Image and Vision Computing, 1992, 10 (5): 283- 288. | |
| Srinivasan S , Popescu S , Eriksson M , et al. Terrestrial laser scanning as an effective tool to retrieve tree level height, crown width, and stem diameter. Remote Sensing, 2015, 7 (2): 1877- 1896. | |
| Tang J , Chen Y W , Kukko A , et al. SLAM-aided stem mapping for forest inventory with small-footprint mobile LiDAR. Forests, 2015, 6 (12): 4588- 4606. | |
| Theiler P W , Wegner J D , Schindler K . Keypoint-based 4-points congruent sets-automated marker-less registration of laser scans. ISPRS Journal of Photogrammetry and Remote Sensing, 2014, 96 (11): 149- 163. | |
| Tremblay J F , Béland M . Towards operational marker-free registration of terrestrial LiDAR data in forests. ISPRS Journal of Photogrammetry and Remote Sensing, 2018, 146, 430- 435. | |
| Tsubouchi T, Asano A, Mochizuki T, et al. 2013. Forest 3D mapping and tree sizes measurement for forest management based on sensing technology for mobile robots. Springer Tracts in Advanced Robotics. Berlin, Heidelberg: Springer Berlin Heidelberg, 357-368. | |
| Zhang W M , Chen Y , Wang H , et al. Efficient registration of terrestrial LiDAR scans using a coarse-to-fine strategy for forestry applications. Agricultural and Forest Meteorology, 2016a, 225, 8- 23. | |
| Zhang W M , Qi J B , Wan P , et al. An easy-to-use airborne LiDAR data filtering method based on cloth simulation. Remote Sensing, 2016b, 8 (6): 501. |
| [1] | Bodong Zhu,Hongbin Luo,Jing Jin,Cairong Yue. Optimization of Individual Tree Segmentation Methods for High Canopy Density Plantation Based on UAV LiDAR [J]. Scientia Silvae Sinicae, 2022, 58(9): 48-59. |
| [2] | Langning Huo,Xiaoli Zhang. Individual Tree Information Extraction and Accuracy Evaluation Based on Airborne LiDAR Point Cloud by Multilayer Clustering Method [J]. Scientia Silvae Sinicae, 2021, 57(1): 85-94. |
| [3] | Li Pinghao, Shen Xin, Dai Jinsong, Cao Lin. Comparisons and Accuracy Assessments of LiDAR-Based Tree Segmentation Approaches in Planted Forests [J]. Scientia Silvae Sinicae, 2018, 54(12): 127-136. |
| [4] | Liu Qingwang, Li Shiming, Li Zengyuan, Fu Liyong, Hu Kailong. Review on the Applications of UAV-Based LiDAR and Photogrammetry in Forestry [J]. Scientia Silvae Sinicae, 2017, 53(7): 134-148. |
| [5] | Duan Zhugeng, Xiao Huashun, Yuan Weixiang. Comparison of Interpolation Methods of Forest Canopy Height Model Using Discrete Point Cloud Data [J]. Scientia Silvae Sinicae, 2016, 52(9): 86-94. |
| [6] | You Lei, Tang Shouzheng, Song Xinyu. An Algorithm of Stem Surface Reconstruction Based on Tangent Plane Projection [J]. Scientia Silvae Sinicae, 2016, 52(11): 115-123. |
| [7] | Qi Yujiao, Li Fengri. Remote Sensing Estimation of Aboveground Forest Carbon Storage in Daxing'an Mountains Based on KNN Method [J]. Scientia Silvae Sinicae, 2015, 51(5): 46-55. |
| [8] | Huang Hongyu;Chen Chongcheng;Zou Jie;Lin Ding. Tree Geometrical 3 D Modeling from Terrestrial Laser Scanned Point Clouds: A Review [J]. Scientia Silvae Sinicae, 2013, 49(4): 123-130. |
| [9] | Guo Xiurong;Lu Huaimin;Du Danfeng. Automatic Measurement Technology for Standing Tree Volume Based on Laser Scanner [J]. Scientia Silvae Sinicae, 2008, 44(9): 72-75. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||