
Scientia Silvae Sinicae ›› 2025, Vol. 61 ›› Issue (9): 162-172.doi: 10.11707/j.1001-7488.LYKX20250036
• Research papers • Previous Articles
Xinzhe Lu,Wenbin Li*( ),Daochun Xu,Xiaopeng Bai
),Daochun Xu,Xiaopeng Bai
Received:2025-01-20
Online:2025-09-25
Published:2025-10-10
Contact:
Wenbin Li
E-mail:leewb@bjfu.edu.cn
CLC Number:
Xinzhe Lu,Wenbin Li,Daochun Xu,Xiaopeng Bai. Tree-Climbing Robot Gaits Inspired by Primate Characteristics[J]. Scientia Silvae Sinicae, 2025, 61(9): 162-172.
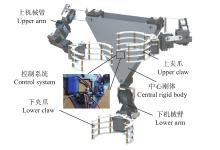
Fig.1
Structure of the three-armed claw-type tree-climbing robot"
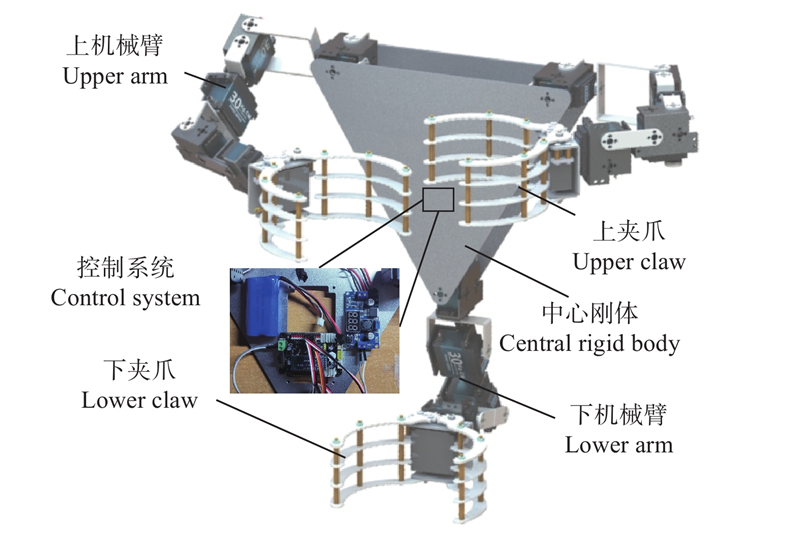

Fig.2
Hardware connections of the robot control system"
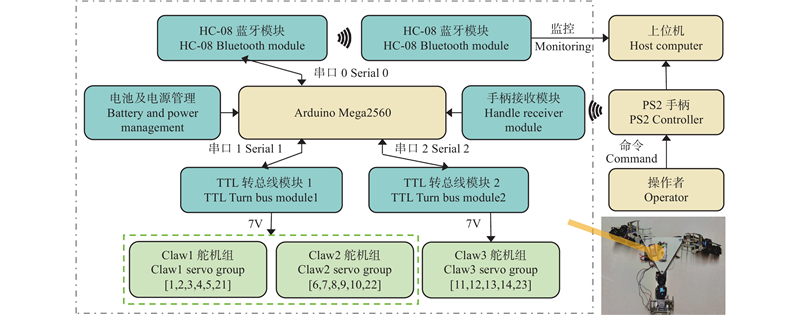

Fig.3
Climbing gait design of the robot"

Fig.4
Reachable workspace of the serial manipulator"
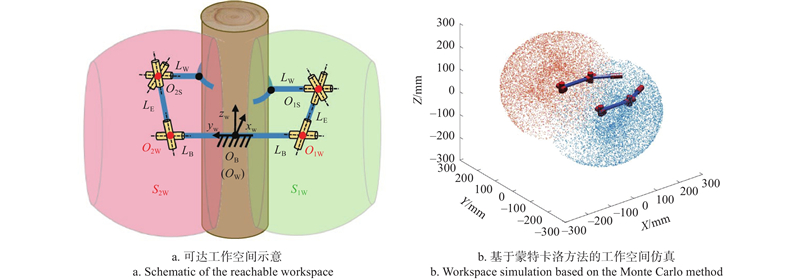

Fig.5
Reachable workspace of the robotic body"
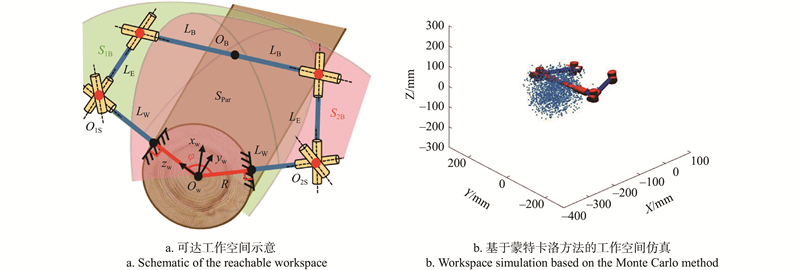

Fig.6
Structural simulation results distribution"
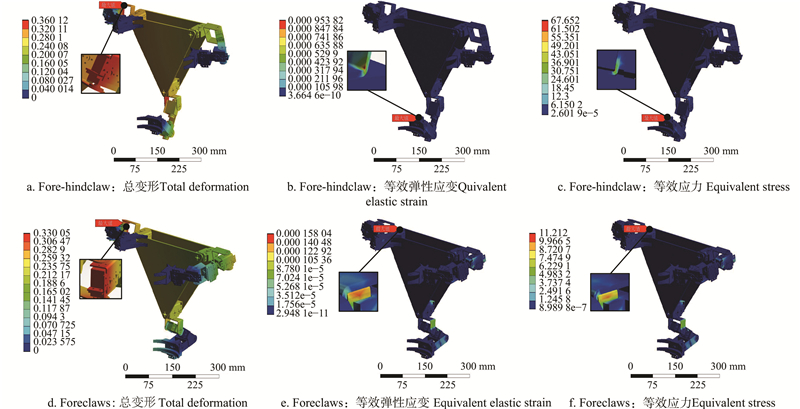
Fig.7
Gait simulation environment setup"
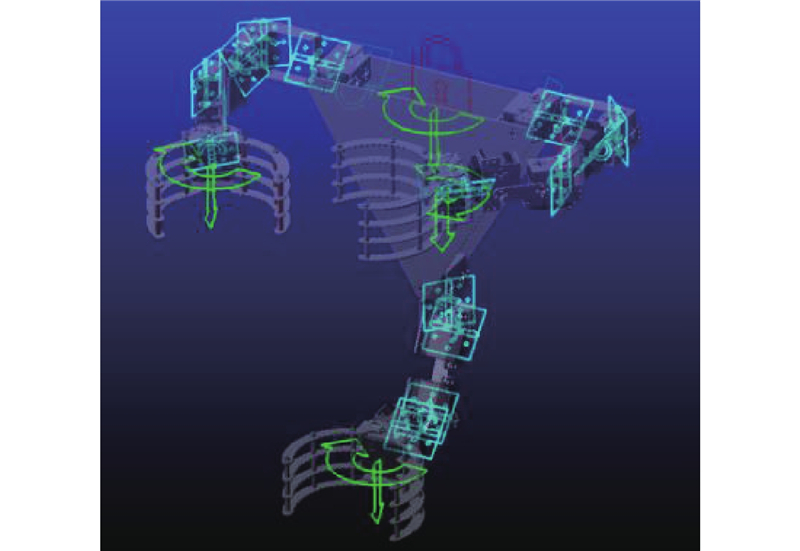
Fig.8
Gait dynamics simulation"
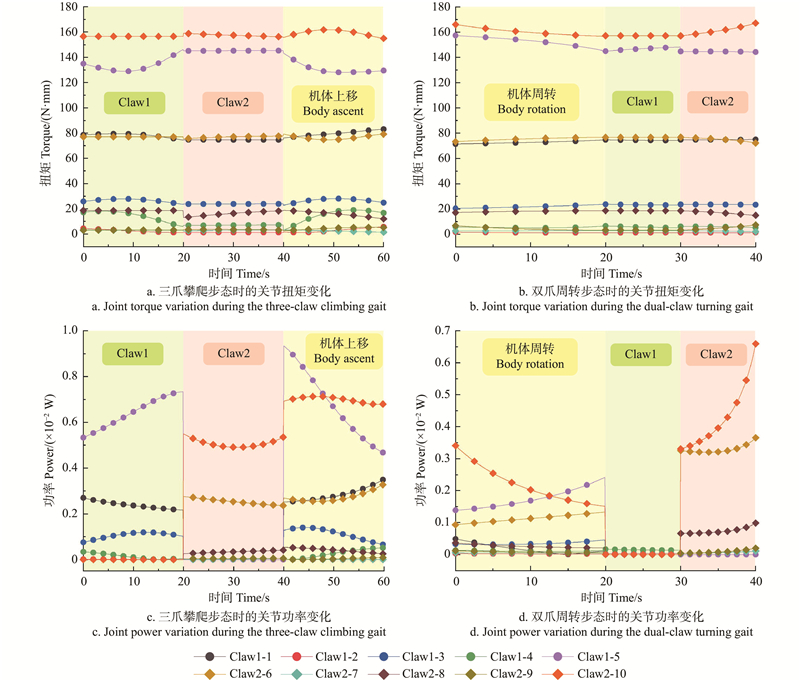

Fig.9
Field validation experiment of the gaits"
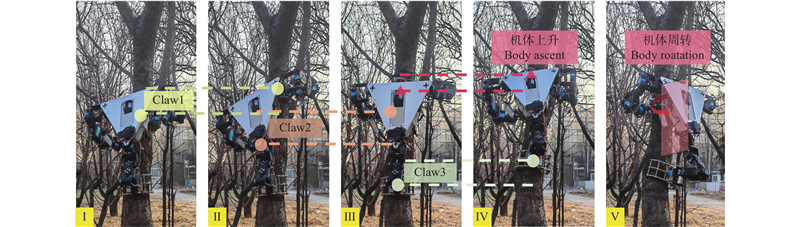

Fig.10
Climbing range experiment"


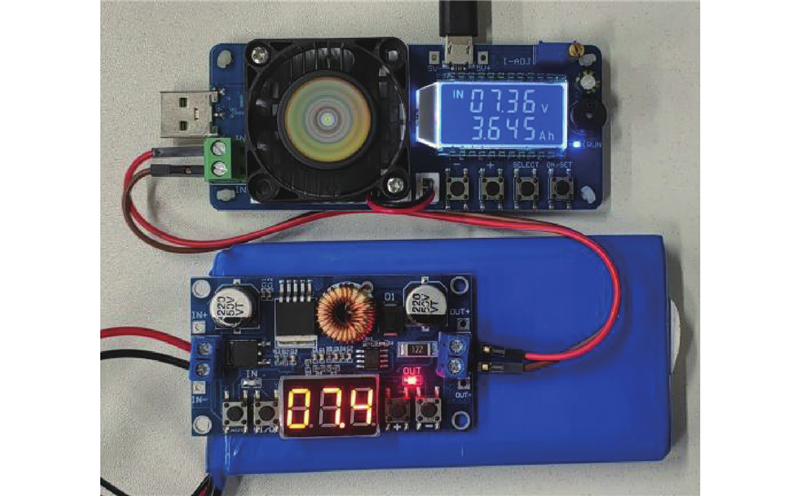
Fig.11
Battery residual capacity test"
| 刘存根, 周玉成, 刘晓平, 等. 一种古建筑木立柱CT扫描攀爬机器人. 林业科学, 2018a, 54 (11): 96- 103. | |
| Liu C G, Zhou Y C, Liu X P, et al. A climbing robot for CT scanning wooden columns in ancient buildings. Scientia Silvae Sinicae, 2018a, 54 (11): 96- 103. | |
| 刘存根, 周玉成, 刘晓平, 等. CT扫描攀爬机器人模糊PID力控制算法. 林业科学, 2018b, 54 (11): 104- 110. | |
| Liu C G, Zhou Y C, Liu X P, et al. Fuzzy PID force control algorithm for the CT scaning climbing robot. Scientia Silvae Sinicae, 2018b, 54 (11): 104- 110. | |
| 林琦峰, 陈 勇, 宋雪萍. 仿树袋熊爬杆机器人的结构设计与仿真分析. 大连交通大学学报, 2021, 42 (2): 60- 65. | |
| Lin Q F, Chen Y, Song X P. Structural design and simulation analysis of climbing pole robot imitating Koala. Journal of Dalian Jiaotong University, 2021, 42 (2): 60- 65. | |
|
刘金成, 王海明, 何亚琼, 等. 无人机技术在精准林业中的应用与挑战. 农业工程学报, 2024, 40 (5): 14- 24.
doi: 10.11975/j.issn.1002-6819.202312131 |
|
|
Liu J C, Wang H M, He Y Q, et al. Application and challenges of UAV–based technology in precision forestry. Transactions of the Chinese Society of Agricultural Engineering, 2024, 40 (5): 14- 24.
doi: 10.11975/j.issn.1002-6819.202312131 |
|
|
Autumn K, Hsieh S T, Dudek D M, et al. Dynamics of geckos running vertically. Journal of Experimental Biology, 2006, 209 (2): 260- 272.
doi: 10.1242/jeb.01980 |
|
|
Ban Y C, Lyu K, Ba S H, et al. Monkeybot: a climbing and pruning robot for standing trees in fast-growing forests. Actuators, 2022, 11 (10): 287.
doi: 10.3390/act11100287 |
|
| Bartlett T. 2007. The hylobatidae, small apes of asia, primates in perspective. Oxford University Press, 274–289. | |
|
Bian S Y, Wei Y L, Xu F, et al. A four-legged wall-climbing robot with spines and miniature setae array inspired by longicorn and gecko. Journal of Bionic Engineering, 2021, 18 (2): 292- 305.
doi: 10.1007/s42235-021-0032-0 |
|
| Biocca M, Bianchini L, Gallo P, et al. 2022. A survey on safety among tree-climber professional arborists.//Safety, health and welfare in agriculture and agro-food systems. Cham: Springer International Publishing, 357−364. | |
|
Dai Y, Li S K, Rui X K, et al. Review of key technologies of climbing robots. Frontiers of Mechanical Engineering, 2023, 18 (4): 48.
doi: 10.1007/s11465-023-0764-0 |
|
|
Dubey A P, Pattnaik S M, Banerjee A, et al. Autonomous control and implementation of coconut tree climbing and harvesting robot. Procedia Computer Science, 2016, 85, 755- 766.
doi: 10.1016/j.procs.2016.05.263 |
|
|
Fan P F, Scott M B, Fei H L, et al. Locomotion behavior of Cao vit gibbon (Nomascus nasutus) living in Karst forest in Bangliang Nature Reserve, Guangxi, China. Integrative Zoology, 2013, 8 (4): 356- 364.
doi: 10.1111/j.1749-4877.2012.00300.x |
|
|
Fang Y, Wang S, Bi Q S, et al. Design and technical development of wall-climbing robots: a review. Journal of Bionic Engineering, 2022, 19 (4): 877- 901.
doi: 10.1007/s42235-022-00189-x |
|
| Granatosky M C, Schmitt D, Hanna J. Comparison of spatiotemporal gait characteristics between vertical climbing and horizontal walking in primates. Journal of Experimental Biology, 2019, 222, jeb185702. | |
|
Granatosky M C, Tripp C H, Schmitt D. Gait kinetics of above- and below-branch quadrupedal locomotion in lemurid Primates. Journal of Experimental Biology, 2016, 219 (1): 53- 63.
doi: 10.1242/jeb.120840 |
|
| Guan Y, Jiang L, Zhu H, et al. 2011. Climbot: A modular bio–inspired biped climbing robot. IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 1473–1478. | |
| Guan Y, Zhu H, Wu W, et al. A modular biped wall-climbing robot with high mobility and manipulating function. IEEE/ASME transactions on mechatronics, 2012, 18, 1787- 1798. | |
|
Gui P F, Tang L Q, Mukhopadhyay S. A novel robotic tree climbing mechanism with anti-falling functionality for tree pruning. Journal of Mechanisms and Robotics, 2018, 10 (1): 014502.
doi: 10.1115/1.4038219 |
|
|
Hanna J B, Schmitt D. Locomotor energetics in Primates: gait mechanics and their relationship to the energetics of vertical and horizontal locomotion. American Journal of Physical Anthropology, 2011, 145 (1): 43- 54.
doi: 10.1002/ajpa.21465 |
|
|
Hunt K D, Cant J G H, Gebo D L, et al. Standardized descriptions of primate locomotor and postural modes. Primates, 1996, 37 (4): 363- 387.
doi: 10.1007/BF02381373 |
|
| Isler K. Characteristics of vertical climbing in gibbons. Evolutionary Anthropology, 2002, 11, 49- 52. | |
| Jiang L, Guan Y S, Zhou X F, et al. 2010. Grasping analysis for a biped climbing robot. IEEE International Conference on Robotics and Biomimetics, Tianjin, China, 579–584. | |
| John G F. 2013. Chapter 2- The Primate Body. Primate Adaptation and Evolution (Third Edition), 9–33. | |
| Kawasaki H, Murakami S, Kachi H, et al. 2008. Novel climbing method of pruning robot. SICE Annual Conference. Chofu, Japan, 160–163. | |
| Kivell T L, Lemelin P, Richmond B G, et al. 2016. The evolution of the primate hand: anatomical, developmental, functional, and paleontological evidence. Springer. | |
| Lam T L, Xu Y S. 2011. A flexible tree climbing robot: Treebot - design and implementation. IEEE International Conference on Robotics and Automation, Shanghai, China, 5849–5854. | |
|
Lam T L, Xu Y S. Biologically inspired tree-climbing robot with continuum maneuvering mechanism. Journal of Field Robotics, 2012, 29 (6): 843- 860.
doi: 10.1002/rob.21414 |
|
|
Liao B, Zang H B, Chen M Y, et al. Soft rod-climbing robot inspired by winding locomotion of snake. Soft Robotics, 2020, 7 (4): 500- 511.
doi: 10.1089/soro.2019.0070 |
|
| Longo D, Caruso L, Conti A, et al. 2013. A survey of safety issues in tree-climbing applications for forestry management. Journal of Agricultural Engineering, s2:44. | |
| Megalingam R K, Kuttankulangara Manoharan S, Mohan S M, et al. Amaran: an unmanned robotic coconut tree climber and harvester. IEEE/ASME Transactions on Mechatronics, 2020, 26, 288- 299. | |
|
Megalingam R K, Thirutheri A, Manoharan S K. Robotic tree climbers and strategies - a survey. International Journal of Intelligent Robotics and Applications, 2025, 9 (1): 319- 343.
doi: 10.1007/s41315-024-00380-9 |
|
|
Michilsens F, Vereecke E E, D’Août K, et al. Functional anatomy of the gibbon forelimb: adaptations to a brachiating lifestyle. Journal of Anatomy, 2009, 215 (3): 335- 354.
doi: 10.1111/j.1469-7580.2009.01109.x |
|
|
Patel B A, Wallace I J, Boyer D M, et al. Distinct functional roles of primate grasping hands and feet during arboreal quadrupedal locomotion. Journal of Human Evolution, 2015, 88, 79- 84.
doi: 10.1016/j.jhevol.2015.09.004 |
|
|
Raichlen D A, Pontzer H, Shapiro L J, et al. Understanding hind limb weight support in chimpanzees with implications for the evolution of primate locomotion. American Journal of Physical Anthropology, 2009, 138 (4): 395- 402.
doi: 10.1002/ajpa.20952 |
|
| Ren D, Yang S, Yan G, et al. 2014. Study on a novel wheel type tree–climbing robot. Seventh International Symposium on Computational Intelligence and Design, Hangzhou, China, 150–153. | |
| Schmidt M. 2005. Hind limb proportions and kinematics: are small Primates different from other small mammals? Journal of Experimental Biology, 208(17): 3367–3383. | |
| Spenko M J, Haynes G C, Saunders J A, et al. Biologically inspired climbing with a hexapedal robot. Journal of Field Robotics, 2008, 25 (4/5): 223- 242. | |
|
Wallace I J, Demes B. Symmetrical gaits of Cebus apella: implications for the functional significance of diagonal sequence gait in Primates. Journal of Human Evolution, 2008, 54 (6): 783- 794.
doi: 10.1016/j.jhevol.2007.10.008 |
|
| Wright C, Buchan A, Brown B, et al. 2012. Design and architecture of the unified modular snake robot. IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 4347−4354. | |
|
Zheng H C, Fu Y X, Wang Z B, et al. Design and experiment of coconut picking robot with climbing. Smart Agricultural Technology, 2024, 9, 100617.
doi: 10.1016/j.atech.2024.100617 |
|
|
Zihlman A L, Mootnick A R, Underwood C E. Anatomical contributions to hylobatid taxonomy and adaptation. International Journal of Primatology, 2011, 32 (4): 865- 877.
doi: 10.1007/s10764-011-9506-y |
| No related articles found! |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||