
Scientia Silvae Sinicae ›› 2025, Vol. 61 ›› Issue (10): 190-200.doi: 10.11707/j.1001-7488.LYKX20240488
• Research papers • Previous Articles
Qingjue Han1,Jiangling Xiao1,Xi Yan1,Zhanxiong Hu1,Jijing Sun2,*( )
)
Received:2024-08-13
Online:2025-10-25
Published:2025-11-05
Contact:
Jijing Sun
E-mail:13966848@qq.com
CLC Number:
Qingjue Han,Jiangling Xiao,Xi Yan,Zhanxiong Hu,Jijing Sun. Adhesion Performance of Bionic Goat Hoof Track Shoes in Soft Geological Conditions of Forested Areas[J]. Scientia Silvae Sinicae, 2025, 61(10): 190-200.

Fig.1
The left hind hoof of the goat"
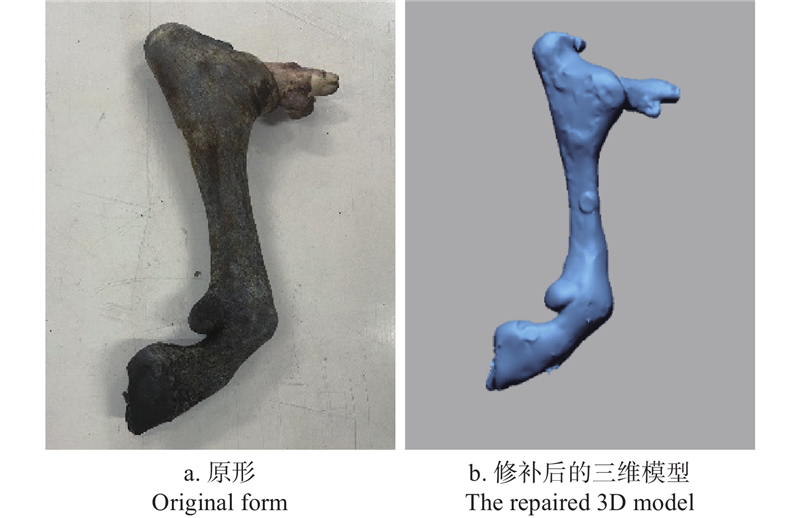
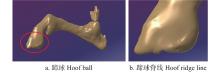
Fig.2
Three-dimensional model of goat hooves"
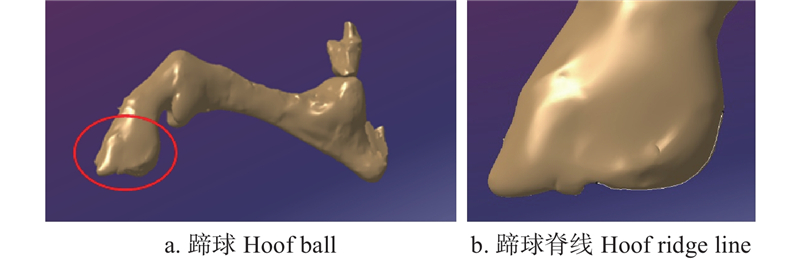
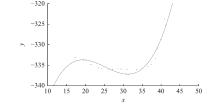
Fig.3
MATLAB third-order polynomial fitting"
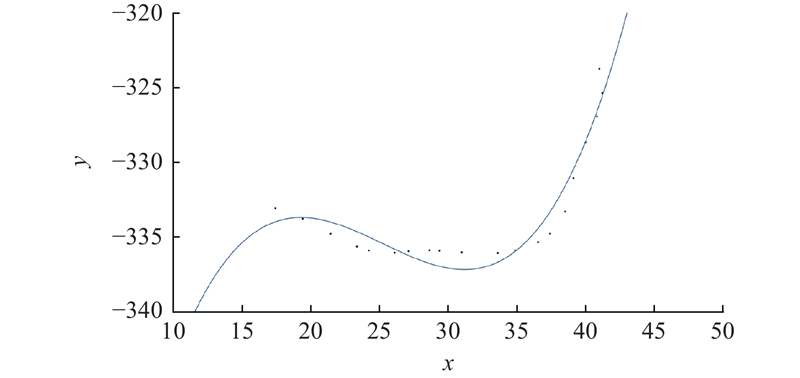
Table 1
Categories and parameters of track shoes"
| 参数Parameters | 符号Symbol | 直齿履带板Straight tooth track plate | 仿生山羊蹄履带板Bionic goat hoof track plate |
| 履带板长Track plate length/mm | l | 150.0 | 150.0 |
| 履带板宽Track plate width/mm | b | 80.0 | 80.0 |
| 履刺厚度Track grouser breadth/mm | d | 19.6 | 25.0 |
| 履刺高度Track grouser height/mm | h | 12.3 | 12.3 |
| 材质Material | — | HT200 | HT200 |
| 弹性模量Modulus of elasticity/GPa | Ε | 140 | 140 |
| 泊松比Poisson’s ratio | μ | 0.25 | 0.25 |
| 密度Density/(kg·m?3) | ρ | 7.8×103 | 7.8×103 |
| 形状Shape | — | 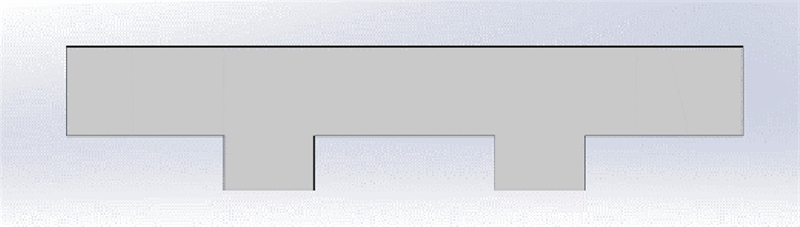 | 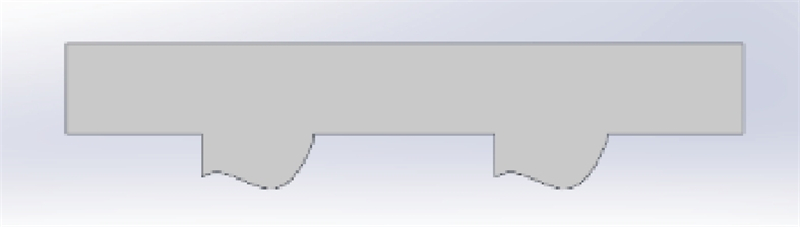 |
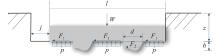
Fig.4
Stress analysis of track shoe j is the displacement of the track shoe as it moves forward, l is the length of the track shoe, W is the gravitational force acting on the track shoe, d is the thickness of the grouser, z is the sinkage, h is the height of the grouser, p is the uniform soil pressure acting on the track shoe, F1 is the force acting on the bottom surface of the track shoe, F2 is the force acting on the grouser."
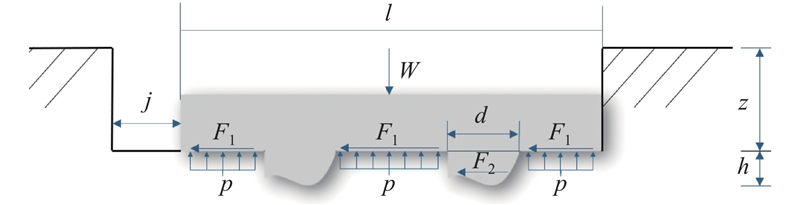
Fig.5
Schematic diagram of sliding surface stress under passive earth pressure"
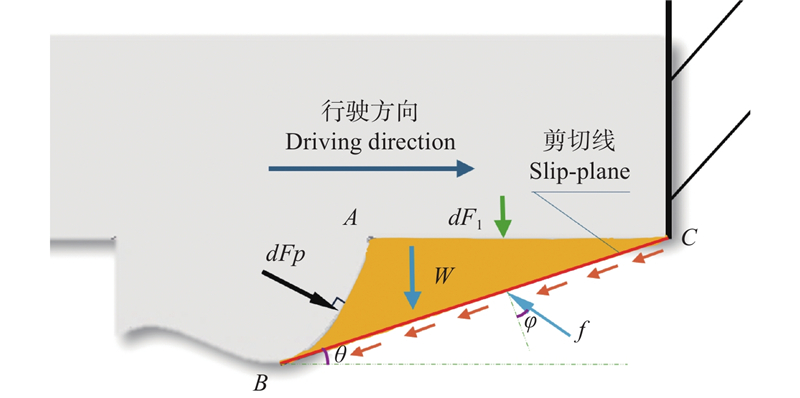
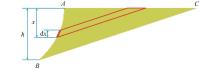
Fig.6
Schematic diagram of the division of the shear soil"
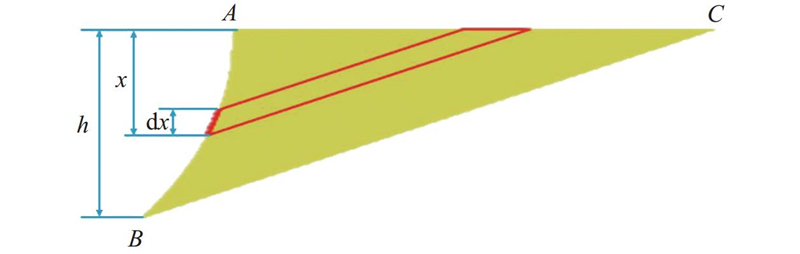

Fig.7
Schematic diagram of forces acting on elements (a) and geometric relations (b)"

Table 2
Soil characteristic parameters of typical forest land"
| 参数Parameters | 符号Symbol | 数值Value |
| 含水率Moisture content (%) | 14.1 | |
| 密度Density/(kg·m?3) | 1 630.0 | |
| 沉陷指数Settlement index | 0.944 7 | |
| 内聚模量Cohesion modulus/(kN·m?(n+1)) | 210.404 7 | |
| 摩擦模量Friction modulus/(kN·m?(n+2)) | 5 674.427 1 | |
| 内摩擦角Angle of internal friction/(°) | 19.648 8 | |
| 黏聚应力Cohesion stress/kPa | 66.263 1 | |
| 泊松比Poisson’s ratio | 0.33 | |
| 弹性模量Modulus of elasticity/Pa | 1×107 |
Table 3
Soil parameters and bonding parameters between soil particles"
| 参数Parameters | 数值Value |
| 密度Density/(kg·m?3) | 1 630 |
| 泊松比Poisson’s ratio | 0.33 |
| 弹性模量Modulus of elasticity/Pa | 1×107 |
| 法向接触点刚度Normal contact stiffness/(Pa·m?3) | 1×106 |
| 切向接触点刚度Tangential contact stiffness/(Pa·m?3) | 1×106 |
| 临界法向应力Critical normal stress/Pa | 1×104 |
| 临界切向应力Critical tangential stress/Pa | 1×104 |
| 黏结半径Bond radius/mm | 1.3 |

Fig.8
Straight tooth track plate (a) and bionic goat foot track shoe (b) simulation system"
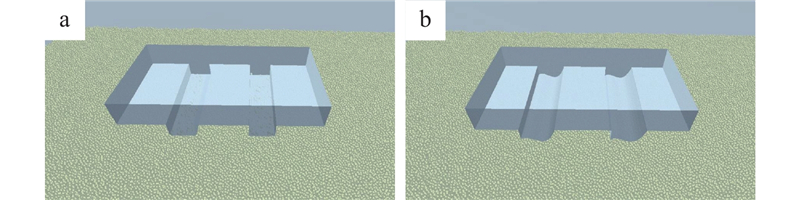

Fig.9
Stress particle distribution of straight tooth track shoe (a) and bionic goat foot track shoe (b)"
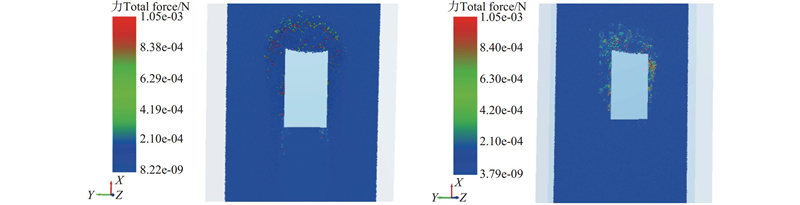
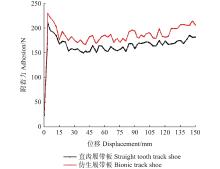
Fig.10
EDEM simulation adhesion of bionic track shoe and straight tooth track shoe"
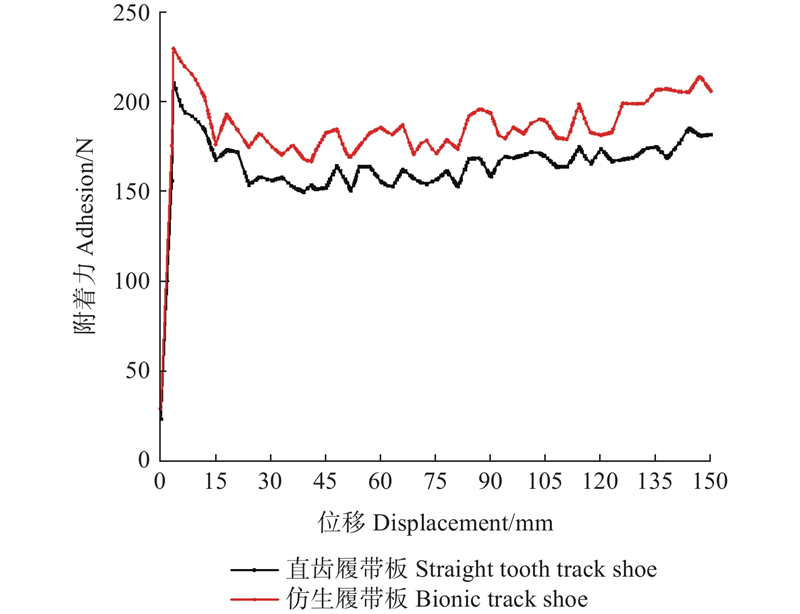
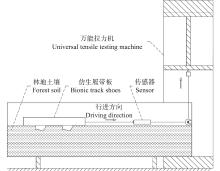
Fig.11
Schematic diagram of soil bin experiment"

Fig.12
Straight tooth track shoe and bionic goat foot track shoe"
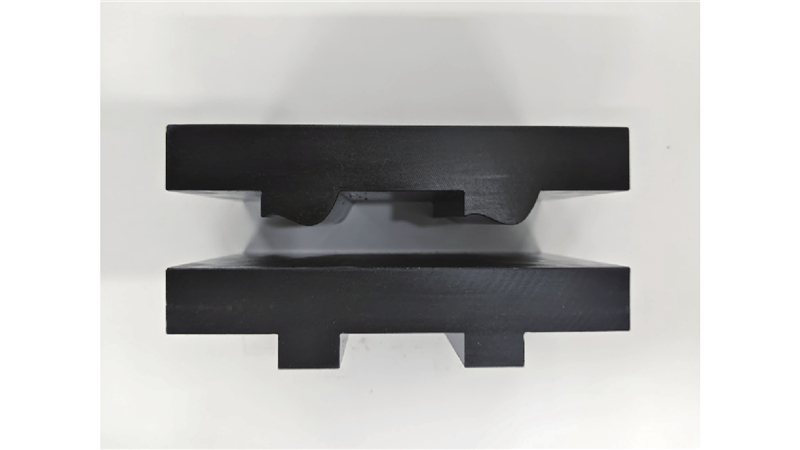

Fig.13
Soil bin experiment"

Fig.14
Experimental adhesion data of soil bin"
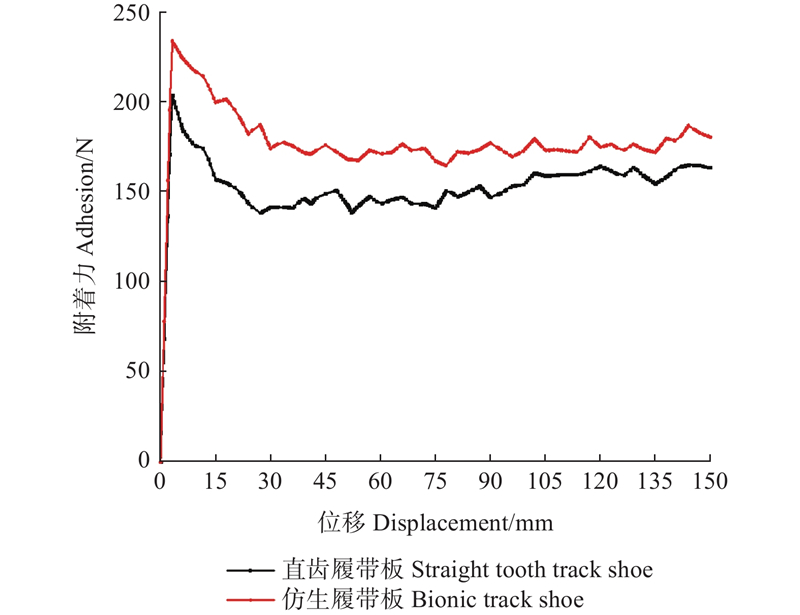
Fig.15
Comparison of theoretical data, simulation data and experimental data of adhesion"
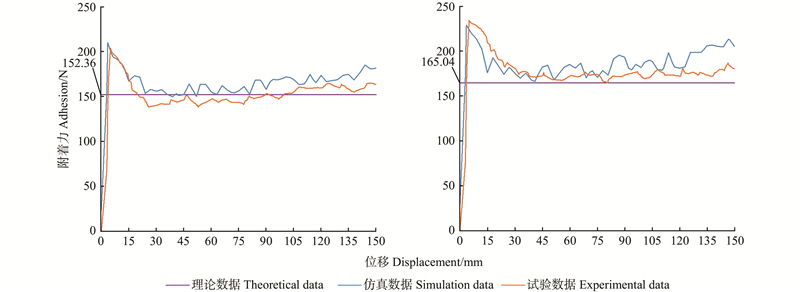
Table 4
Comparison between theoretical value, simulation value and experimental value of adhesion"
| 附着力Adhesion | 理论值Theoretical value | 仿真值Simulation value | 试验值Experimental value |
| 直齿履带板Straight tooth track plate/N | 152.36 | 161.33 | 150.89 |
| 仿生山羊蹄履带板Bionic goat hoof track plate/N | 165.04 | 181.17 | 173.41 |
| 百分比增加Percentage increase (%) | 8.32 | 12.30 | 14.92 |
| 邓 沁. 2024. 不同产量油茶林地土壤养分与果实经济性状研究. 长沙: 中南林业科技大学. | |
| Deng Q. Study on soil nutrient and fruit economic traits in Camellia oleifera forest with different yields. Changsha: Central South University of Forestry and Technology. [in Chinese] | |
| 干霖杰, 黄青青, 陈 劭. 鸵鸟足型沙地履带板设计及牵引性能研究. 机械科学与技术, 2022, 41 (5): 673- 680. | |
| Gan L J, Huang Q Q, Chen S. Study on design and traction performance of ostrich-foot sandy track shoe. Mechanical Science and Technology for Aerospace Engineering, 2022, 41 (5): 673- 680. | |
| 田为军, 王骥月, 李 明, 等. 仿山羊蹄匣孔结构的减振单元设计及优化. 振动工程学报, 2018, 31 (2): 352- 357. | |
| Tian W J, Wang J Y, Li M, et al. Design and optimization of vibration reduction structure imitating pore structure in goat capsula ungulae. Journal of Vibration Engineering, 2018, 31 (2): 352- 357. | |
| 王宝昌, 孙术发, 张嘉仪, 等. 沙漠履带式运输车通过性仿真与试验. 森林工程, 2024, 40 (4): 186- 195. | |
| Wang B C, Sun S F, Zhang J Y, et al. Chassis trafficability simulation and experiment of desert crawler transport vehicle. Forest Engineering, 2024, 40 (4): 186- 195. | |
| 王学振, 岳 斌, 高喜杰, 等. 深松铲不同翼铲安装高度时土壤扰动行为仿真与试验. 农业机械学报, 2018, 49 (10): 124- 136. | |
| Wang X Z, Yue B, Gao X J, et al. Discrete element simulations and experiments of disturbance behavior as affected by mounting height of subsoiler’s wing. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49 (10): 124- 136. | |
| 吴鸿云, 陈新明, 刘少军, 等. 履带板、齿间黏附底质对集矿机附着性能的影响. 农业工程学报, 2010, 26 (10): 140- 145. | |
| Wu H Y, Chen X M, Liu S J, et al. Influence of soft sediment adhered to track on adhesion performance of seabed track vehicle. Transactions of the Chinese Society of Agricultural Engineering, 2010, 26 (10): 140- 145. | |
| 吴曙光. 2016. 土力学. 重庆: 重庆大学出版社. | |
| Wu S G. 2016. Soil mechanics. Chongqing: Chongqing University Press. [in Chinese] | |
| 邢洁洁, 张 锐, 吴 鹏, 等. 海南热区砖红壤颗粒离散元仿真模型参数标定. 农业工程学报, 2020, 36 (5): 158- 166. | |
| Xing J J, Zhang R, Wu P, et al. Parameter calibration of discrete element simulation model for latosol particles in hot areas of Hainan Province. Transactions of the Chinese Society of Agricultural Engineering, 2020, 36 (5): 158- 166. | |
| 熊平原, 杨 洲, 孙志全, 等. 基于离散元法的旋耕刀三向工作阻力仿真分析与试验. 农业工程学报, 2018, 34 (18): 113- 121. | |
| Xiong P Y, Yang Z, Sun Z Q, et al. Simulation analysis and experiment for three-axis working resistances of rotary blade based on discrete element method. Transactions of the Chinese Society of Agricultural Engineering, 2018, 34 (18): 113- 121. | |
| 熊顺贵. 1996. 基础土壤学. 北京: 中国农业科学技术出版社. | |
| Xiong S G. 1996. Basic soil science. Beijing: China Agricultural Science and Technology Press. [in Chinese] | |
| 杨聪彬. 2015. 高速履带与软地面附着特性与优化研究. 北京: 北京理工大学. | |
| Yang C B. 2015. Research on the adhesion property of high-speed trackon soft ground and optimization of track shoe. Beijing: Beijing Institute of Technology. [in Chinese] | |
| 袁 艺, 盖江涛, 韩政达, 等. 履带打滑条件下的电驱动车辆转向运动学研究. 车辆与动力技术, 2017, (1): 6- 10. | |
| Yuan Y, Gai J T, Han Z D, et al. Study on electric vehicle steering kinematics considered tracks’ skid and slip. Vehicle & Power Technology, 2017, (1): 6- 10. | |
| 曾得贵. 2018. 履带车辆砂壤路面通过性数值仿真研究. 长沙: 国防科技大学. | |
| Zeng D G. 2018. Numerical simulation of tracked vehicle’s mobility on sandy soil. Changsha: National University of Defense Technology. [in Chinese] | |
| 张 伏, 王亚飞, 马田乐, 等. 山羊蹄底部非规则曲面仿生形貌数学模型构建及验证. 农业工程学报, 2018, 34 (15): 30- 36. | |
| Zhang F, Wang Y F, Ma T L, et al. Mathematical model establishment and validation of bionic irregular plantar surface of goat’s hoof. Transactions of the Chinese Society of Agricultural Engineering, 2018, 34 (15): 30- 36. | |
| 张季琴, 杨福增, 刘 世. 微型履带拖拉机牵引附着性能研究——基于正交试验. 农机化研究, 35(10): 190−193, 198. | |
| Zhang J Q, Yang Z F, Liu S. 2013. Research of the micro-crawler tractor adhesion performance-based on orthogonal experiment. Journal of Agricultural Mechanization Research, 35(10): 190−193, 198. [in Chinese] | |
| 张克健. 2002. 车辆地面力学. 北京: 国防工业出版社. | |
| Zhang K J. 2002. Vehicle-terramechanics. Beijing: National Defense Industry Press. [in Chinese] | |
| 朱思哲, 刘 虔. 三轴试验原理及试验技术 (二). 水电与抽水蓄能, 1990, 14 (6): 31- 38. | |
| Zhu S Z, Liu Q. Triaxial test principles and test techniques (part two). Hydropower and Pumped Storage, 1990, 14 (6): 31- 38. | |
|
Chen Y L, Zhu W, Qi W G, et al. Study on an analytical solution to the mechanical response of soil cut by a bionic force enhancement grouser. Journal of Marine Science and Engineering, 2021, 9 (12): 1401.
doi: 10.3390/jmse9121401 |
|
|
Fang Y, Zhang Y N, Shang Y H, et al. Center-point steering analysis of tracked omni-vehicles based on skid conditions. Mechanical Sciences, 2021, 12 (1): 511- 527.
doi: 10.5194/ms-12-511-2021 |
|
|
Ferretti G, Girelli R. Modelling and simulation of an agricultural tracked vehicle. Journal of Terramechanics, 1999, 36 (3): 139- 158.
doi: 10.1016/S0022-4898(99)00004-X |
|
|
Fu J, Li J, Tang X L, et al. Optimization of structure parameters of the grouser shoes for adhesion reduction under black soil. Agriculture, 2021, 11 (8): 795.
doi: 10.3390/agriculture11080795 |
|
|
Johnson K L, Kendall K, Roberts A A D. Surface energy and the contact of elastic solids. Proceedings of the Royal Society of London A Mathematical and Physical Sciences, 1971, 324 (1558): 301- 313.
doi: 10.1098/rspa.1971.0141 |
|
|
Li Y, He D C, Si Q R, et al. Effect of track shoes structural parameters on traction performance of unmanned underwater tracked bulldozer. Ocean Engineering, 2021, 237, 109655.
doi: 10.1016/j.oceaneng.2021.109655 |
|
|
Xu F, Rao Q H, Ma W B. Track shoe structure optimization of deep-sea mining vehicle based on new rheological calculation formulae of sediment. Mechanics Based Design of Structures and Machines, 2019, 47 (4): 479- 496.
doi: 10.1080/15397734.2019.1565498 |
|
|
Zhang F, Wang Y F, Teng S, et al. Development of agricultural bionic four-legged robot: effect of head movement adjustment on the stability of goats. International Journal of Agricultural and Biological Engineering, 2019, 12 (4): 10- 15.
doi: 10.25165/j.ijabe.20191204.4287 |
|
|
Zhang F, Zhang C C, Teng S, et al. Research on the adhesive performance of a biomimetic goat hoof track shoe pattern. Biomimetics, 2022, 7 (2): 80.
doi: 10.3390/biomimetics7020080 |
|
|
Zhang F, Zheng L M, Wang W, et al. Development of agricultural bionic mechanisms: investigation of the effect of joint angle and pressure on the stability of goats moving on sloping lands. International Journal of Agricultural and Biological Engineering, 2018, 11 (3): 35- 41.
doi: 10.25165/j.ijabe.20181103.3633 |
| No related articles found! |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||