
Scientia Silvae Sinicae ›› 2021, Vol. 57 ›› Issue (8): 68-81.doi: 10.11707/j.1001-7488.20210807
Previous Articles Next Articles
Zhongqiu Sun1,Jinping Gao1,Fayun Wu1,Xianlian Gao1,Yang Hu2,*,Jianxin Gao1
Received:2020-03-03
Online:2021-08-25
Published:2021-09-30
Contact:
Yang Hu
CLC Number:
Zhongqiu Sun,Jinping Gao,Fayun Wu,Xianlian Gao,Yang Hu,Jianxin Gao. Estimating Forest Stock Volume via Small-Footprint LiDAR Point Cloud Data and Random Forest Algorithm[J]. Scientia Silvae Sinicae, 2021, 57(8): 68-81.
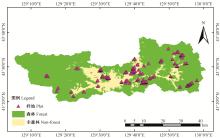
Fig.1
Forest and sample plot distribution of research area"

Table 1
Sample stand stock volume statistics"
| 类别 Type | 最小值 Minimum/(m3·hm-2) | 最大值 Maximum/(m3·hm-2) | 平均 Mean/(m3·hm-2) | 标准误差 Standard error/(m3·hm-2) | 标准差 Standard deviation/(m3·hm-2) | 样本量 Sample size |
| 总样本 Total sample | 4.25 | 467.09 | 123.27 | 5.64 | 85.87 | 232 |
| 训练样本 Training sample | 7.08 | 467.09 | 128.48 | 6.86 | 87.90 | 164 |
| 验证样本 Validation sample | 4.25 | 336.87 | 110.69 | 9.70 | 79.99 | 68 |
Table 2
An overview of airborne LiDAR data"
| 指标Index | 设计Design | 实际Actual |
| 视场角FOV/(°) | 58.5 | 58.5 |
| 扫描频率Scanning frequency | 2×211 | 2×215 |
| 旁向重叠度Side overlap(%) | 23 | 18~25 |
| 航线数Number of routes | 82 | 82 |
| 点云密度Point cloud density/m-2 | 10 | ≈13 |
| 数据量Data volume/TB | 1.51 | 1.72 |
| 高程中误差Mid elevation error/m | 0.15~0.20 | 0.137 |
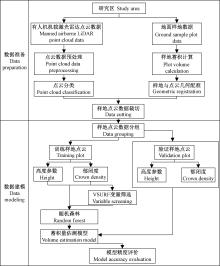
Fig.2
Flow chart of forest stock volume estimation"

Table 3
Tree species group basic information"
| 树种组 Tree species group | 树种 Tree species |
| 天然针叶Ⅰ Natural coniferous forest Ⅰ | 红松(包括东北红豆杉)、云杉(包括鱼鳞云杉、红皮云杉) Pinus koraiensis(including Taxus cuspidata), Picea asperata (including Picea jezoensis var. microsperma, Picea koraiensis ) |
| 天然针叶Ⅱ Natural coniferous forest Ⅱ | 臭松、落叶松、樟子松(包括樟子松、赤松、黑松、油松、长白松)、其他针叶 Abies nephrolepis, Larix gmelinii, Pinus sylvestris var. mongolica (including Pinus sylvestris var. mongolica, Pinus densiflora, Pinus thunbergii, Pinus tabulaeformis, Pinus sylvestriformis), other conifers forests |
| 天然阔叶Ⅰ Natural broad-leaved forest Ⅰ | 水曲柳、胡桃楸、黄檗 Fraxinus mandshurica, Juglans mandshurica, Phellodendron amurense |
| 天然阔叶Ⅱ Natural broad-leaved forest Ⅱ | 椴、枫桦 Tilia tuan, Betula costata |
| 天然阔叶Ⅲ Natural broad-leaved forest Ⅲ | 蒙古栎、黑桦 Quercus mongolica, Betula dahurica |
| 天然阔叶Ⅳ Natural broad-leaved forest Ⅳ | 色木槭、榆 Acer mono, Ulmus pumila |
| 天然阔叶Ⅴ Natural broad-leaved forest Ⅴ | 杨树、白桦 Populus, Betula platyphylla |
| 天然阔叶Ⅵ Natural broad-leaved forest Ⅵ | 其他阔叶 Other broad-leaved forests |
| 人工针叶Ⅰ Artificial coniferous forest Ⅰ | 人工红松(包括人工东北红豆杉)、人工云杉(包括人工鱼鳞云杉、人工红皮云杉) Artificial Pinus koraiensis (including artificial Taxus cuspidata), artificial Picea asperata (including artificial Picea jezoensis var. microsperma, artificial Picea koraiensis) |
| 人工针叶Ⅱ Artificial coniferous forest Ⅱ | 人工樟子松(包括人工樟子松、人工赤松、人工黑松、人工油松、人工长白松)、人工臭松、人工其他针叶 Artificial Pinus sylvestris var. mongolica(including artificial Pinus sylvestris var. mongolica, artificial Pinus densiflora, artificial Pinus thunbergii, artificial Pinus tabulaeformis, artificial Pinus sylvestriformis), artificial Abies nephrolepis, artificial other conifers forests |
| 人工落叶松 Artificial larch | 人工落叶松 Artificial Larix gmelinii |
| 人工杨树 Artificial poplar | 人工杨树(包括人工朝鲜柳) Artificial Populus (including artificial Salix koreensis) |

Fig.3
Height percentile of LiDAR point cloud"

Table 4
Input variables"
| 输入变量名 Variable name | 含义 Meaning | 变量个数 Number of variables | 输入变量名 Variable name | 含义 Meaning | 变量个数 Number of variables | |
| Hmax | 最大值Maximum | 1 | Hstd | 标准差Standard deviation | 1 | |
| Hmin | 最小值Minimum | 1 | Hskew | 偏斜度Skewness | 1 | |
| Hmean | 平均值Mean | 1 | Hsqrt_mean_sq | 二次幂平均Second power mean | 1 | |
| Hmedian | 中位数Median | 1 | Hvar | 方差Variance | 1 | |
| H% | 高度百分位数Height percentile | 15 | Pc | 郁闭度Crown density | 1 |

Fig.4
Evaluation indicators of height parameter modeling"

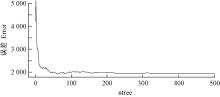
Fig.5
Optimal ntree parameter of height parameter modeling"
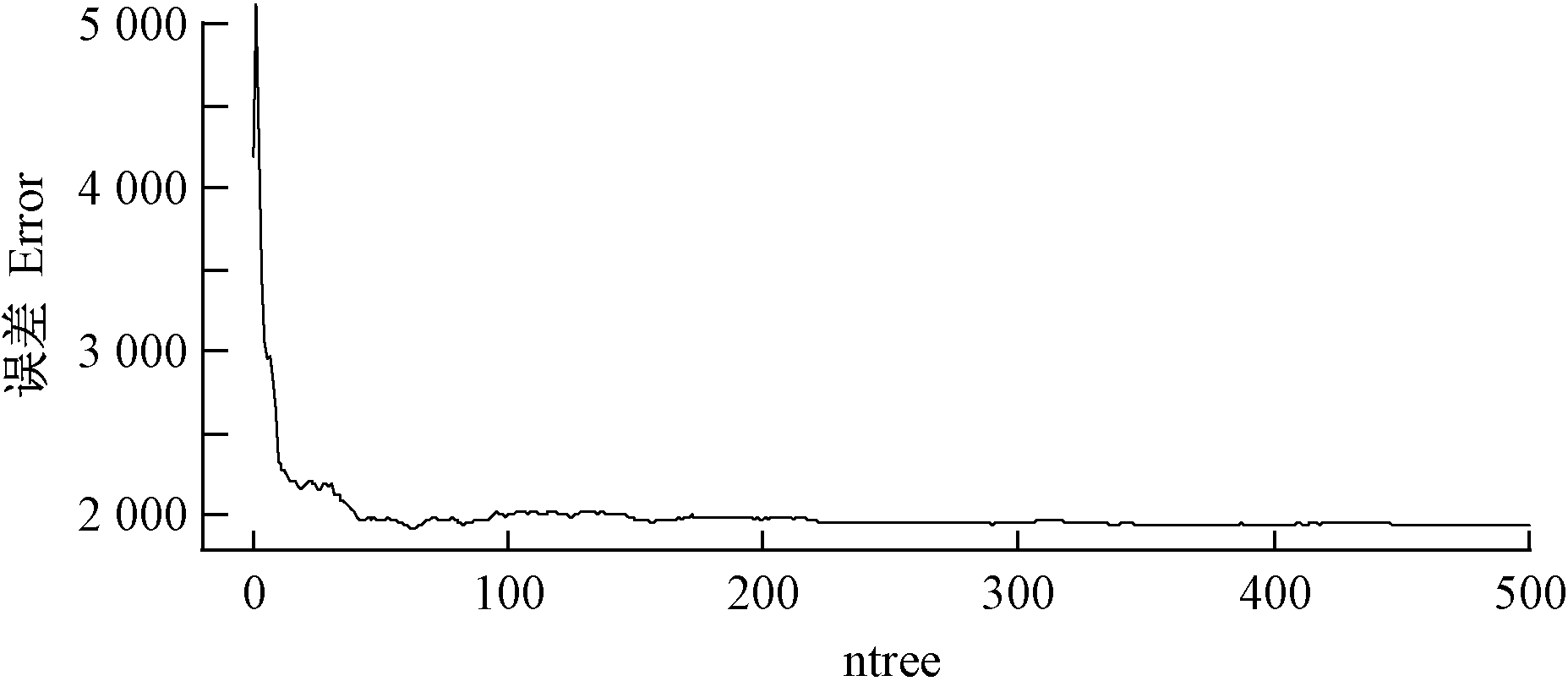
Fig.6
Evaluation indicators of height parameter and crown density modeling"

Fig.7
Optimal ntree parameter of height parameter and crown density modeling"


Fig.8
Estimation forest stock volume only using height parameters(left: training result; right: validation result)"
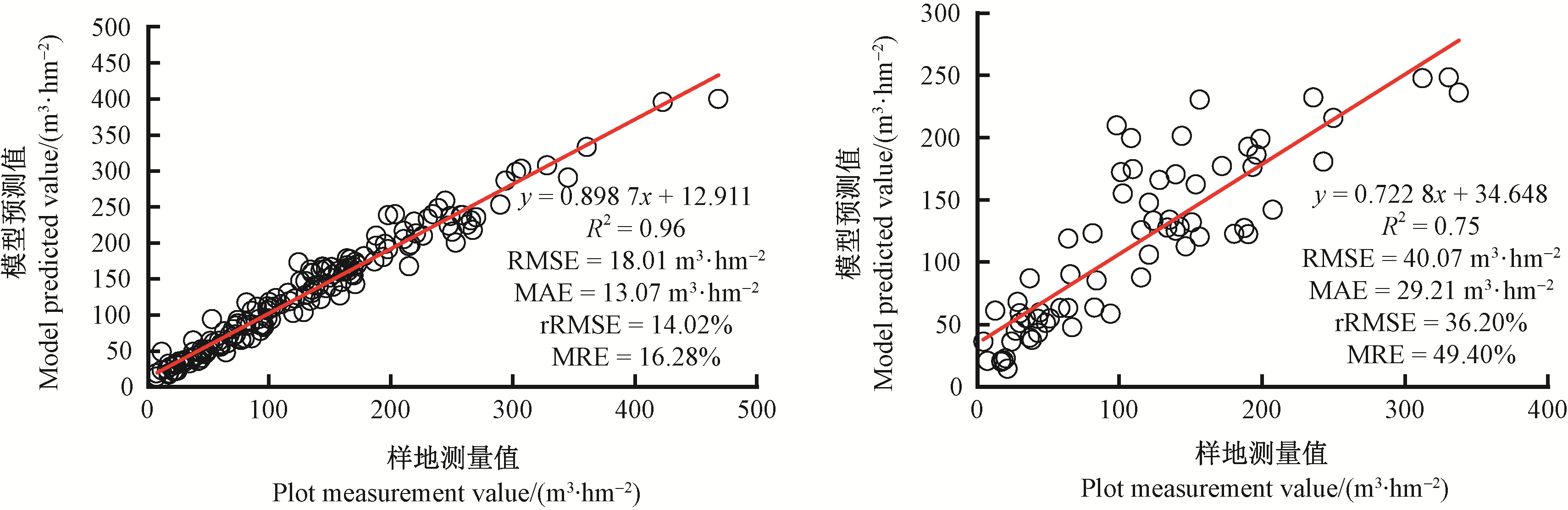

Fig.9
Estimation forest stock volume using height parameters and canopy density(left: training result; right: validation result)"
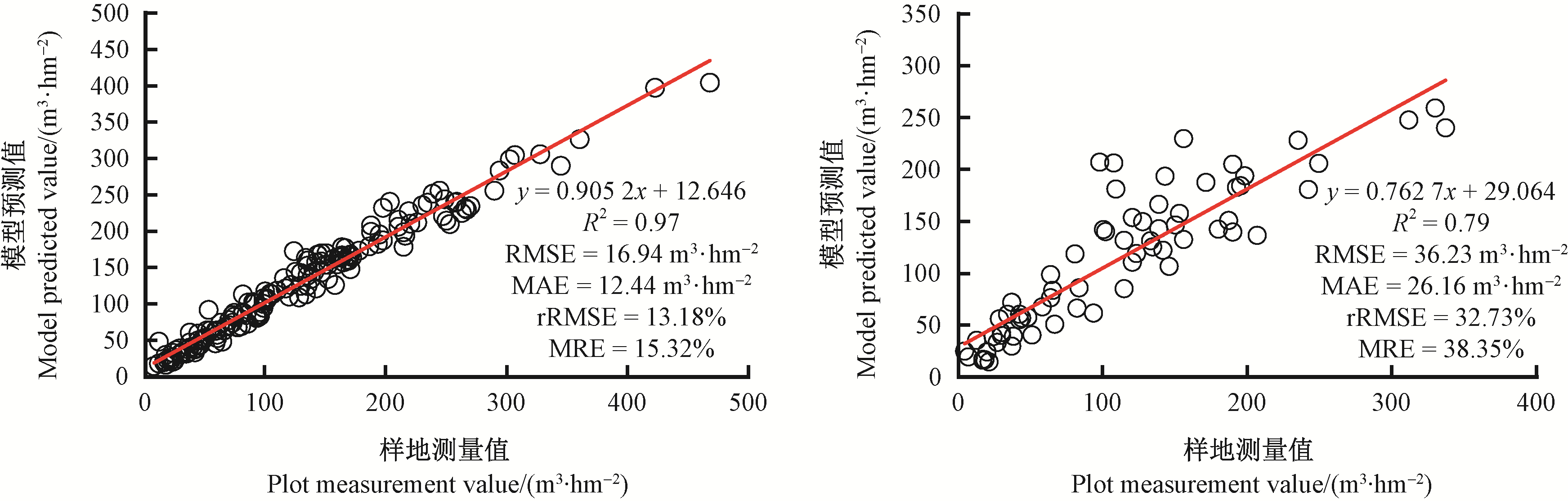

Fig.10
Variable selection based on VSURF package"

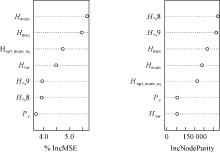
Fig.11
The importance of selecting variables"
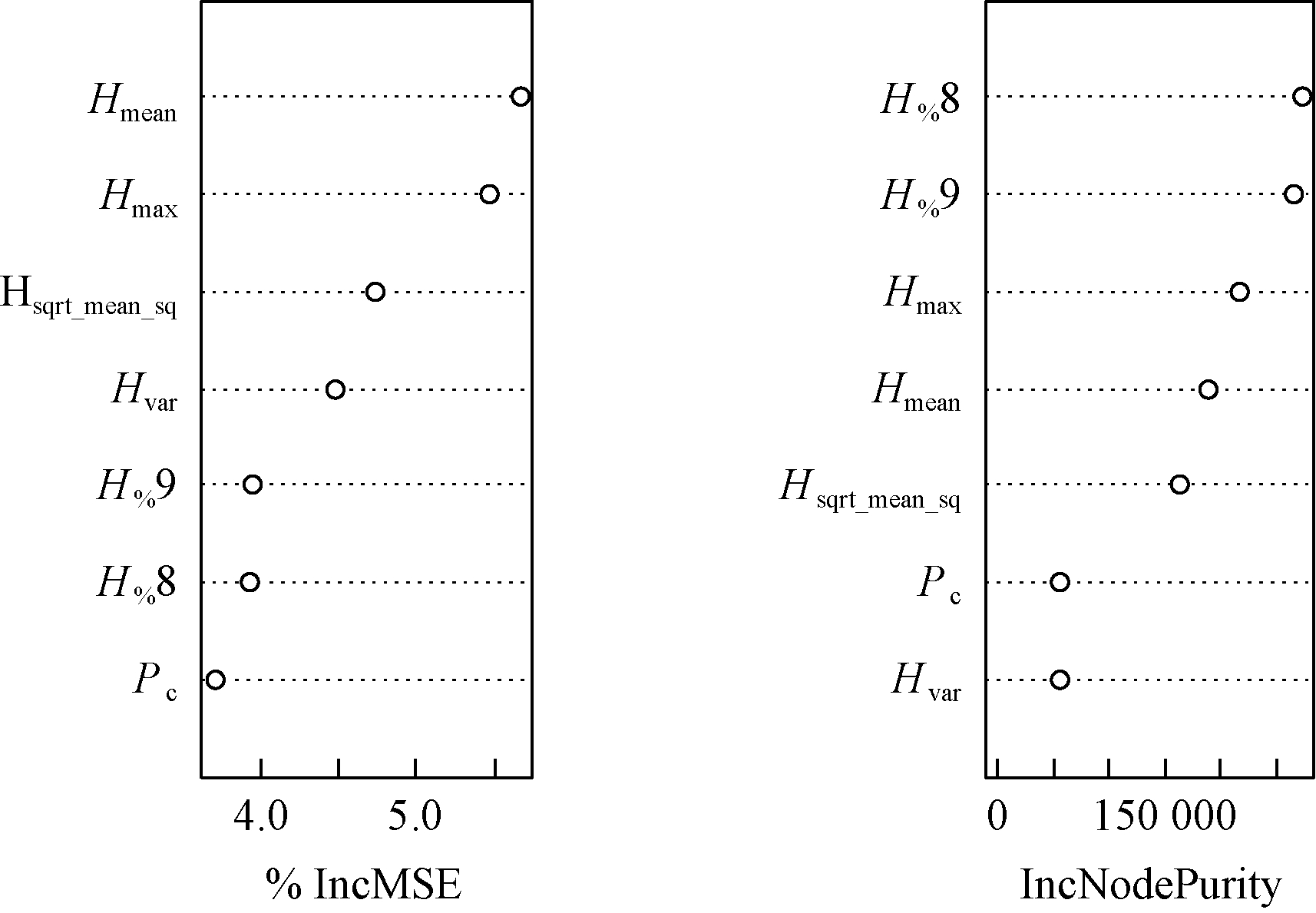

Fig.12
Estimation forest stock volume using selection variables(left: training result; right: validation result)"

Table 5
Ten times results in the training phases"
| 序号 No. | R2 | RMSE/(m3·hm-2) | rRMSE(%) | MAE/(m3·hm-2) | MRE(%) |
| 1 | 0.96 | 17.06 | 14.16 | 12.21 | 14.15 |
| 2 | 0.96 | 16.89 | 13.35 | 12.38 | 13.78 |
| 3 | 0.97 | 16.34 | 13.09 | 12.02 | 13.65 |
| 4 | 0.96 | 17.27 | 14.47 | 12.50 | 14.46 |
| 5 | 0.96 | 18.16 | 14.67 | 13.22 | 14.70 |
| 6 | 0.96 | 17.59 | 14.37 | 12.38 | 14.11 |
| 7 | 0.96 | 18.34 | 14.17 | 13.19 | 14.18 |
| 8 | 0.97 | 16.55 | 13.36 | 11.89 | 13.57 |
| 9 | 0.96 | 18.03 | 13.77 | 13.19 | 14.06 |
| 10 | 0.97 | 17.39 | 12.97 | 12.60 | 13.40 |
Table 6
Ten times results in the validation phases"
| 序号 No. | R2 | RMSE/(m3·hm-2) | rRMSE(%) | MAE/(m3·hm-2) | MRE(%) |
| 1 | 0.81 | 49.82 | 42.29 | 31.82 | 34.53 |
| 2 | 0.79 | 43.13 | 33.87 | 30.08 | 35.88 |
| 3 | 0.76 | 43.03 | 36.37 | 29.81 | 34.91 |
| 4 | 0.80 | 41.99 | 33.53 | 29.56 | 32.56 |
| 5 | 0.78 | 39.50 | 31.54 | 27.08 | 32.12 |
| 6 | 0.79 | 35.99 | 29.49 | 26.18 | 30.83 |
| 7 | 0.79 | 36.09 | 31.45 | 28.02 | 35.47 |
| 8 | 0.75 | 39.83 | 32.68 | 29.45 | 34.31 |
| 9 | 0.76 | 40.77 | 34.04 | 30.05 | 37.69 |
| 10 | 0.78 | 32.84 | 30.41 | 25.38 | 35.63 |
| 曹林, 代劲松, 徐建新, 等. 基于机载小光斑LiDAR技术的亚热带森林参数信息优化提取. 北京林业大学学报, 2014, 36 (5): 13- 21. | |
| Cao L , Dai J S , Xu J X , et al. Optimized extraction of forest parameters in subtropical forests based on airborne small footprint LiDAR technology. Journal of Beijing Forestry University, 2014, 36 (5): 13- 21. | |
| 曹林, 佘光辉, 代劲松, 等. 激光雷达技术估测森林生物量的研究现状及展望. 南京林业大学学报: 自然科学版, 2013, 37 (3): 163- 169. | |
| Cao L , She G H , Dai J S , et al. Status and prospects of the LiDAR-based forest biomass estimation. Journal of Nanjing Forestry University: Natural Sciences, 2013, 37 (3): 163- 169. | |
| 陈新云, 王文文, 曾伟生, 等. 北京市二类调查小班蓄积量预估模型研究. 林业资源管理, 2019, (5): 33- 36. | |
| Chen X Y , Wang W W , Zeng W S , et al. Research on the forecasting model of the second-class small class stock in Beijing. Forestry Resource Management, 2019, (5): 33- 36. | |
| 段祝庚, 肖化顺, 袁伟湘. 基于离散点云数据的森林冠层高度模型插值方法. 林业科学, 2016, 52 (9): 86- 94. | |
| Duan Z G , Xiao H S , Yuan W X . Comparison of interpolation methods of forest canopy height model using discrete point cloud data. Scientia Silvae Sinicae, 2016, 52 (9): 86- 94. | |
|
高婷, 李卫忠, 赵鹏祥, 等. 基于ArboLiDAR的大野口林区森林参数估测. 西北林学院学报, 2017, 32 (4): 172- 177.
doi: 10.3969/j.issn.1001-7461.2017.04.30 |
|
|
Gao T , Li W Z , Zhao P X , et al. ArboLiDAR based prediction of the forest parametersng in Dayekou. Journal of Northwest Forestry University, 2017, 32 (4): 172- 177.
doi: 10.3969/j.issn.1001-7461.2017.04.30 |
|
| 耿林, 李明泽, 范文义, 等. 基于机载LiDAR的单木结构参数及林分有效冠的提取. 林业科学, 2018, 54 (7): 62- 72. | |
| Geng L , Li M Z , Fan W Y , et al. Individual tree structure parameters and effective crown of the stand extraction base on airborn LiDAR data. Scientia Silvae Sinicae, 2018, 54 (7): 62- 72. | |
| 李崇贵, 赵宪文, 李春干, 等. 森林蓄积量遥感估测理论与实现. 北京: 科学出版社, 2006. | |
| Li C G , Zhao X W , Li C G , et al. Remote sensing estimation theory and realization of forest stock. Beijing: Science Press, 2006. | |
| 李世波, 林辉, 王光明, 等. 基于GF-1的森林蓄积量遥感估测. 中南林业科技大学学报, 2019, 39 (8): 70- 75, 86. | |
| Li S B , Lin H , Wang G M , et al. Remote sensing estimation of forest stock based on GF-1. Journal of Central South University of Forestry & Technology, 2019, 39 (8): 70- 75, 86. | |
| 李增元, 刘清旺, 庞勇. 激光雷达森林参数反演研究进展. 遥感学报, 2016, 20 (5): 1138- 1150. | |
| Li Z Y , Liu Q W , Pang Y . Review on forest parameters inversion using LiDAR. Journal of Remote Sensing, 2016, 20 (5): 1138- 1150. | |
| 刘浩, 张峥男, 曹林. 机载激光雷达森林垂直结构剖面参数的沿海平原人工林林分特征反演. 遥感学报, 2018, 22 (5): 872- 888. | |
| Liu H , Zhang Z N , Cao L . Estimating forest stand characteristics in a coastal plain forest plantation based on vertical structure profile parameters derived from ALS data. Journal of Remote Sensing, 2018, 22 (5): 872- 888. | |
| 刘美爽, 邢艳秋, 吴红波, 等. 基于ICESat-GLAS波形估测平均树高的研究. 林业科学研究, 2014, 27 (3): 309- 315. | |
| Liu M S , Xing Y Q , Wu H B , et al. Study on mean forest canopy height estimation based on ICESat-GLAS waveforms. Forest Research, 2014, 27 (3): 309- 315. | |
| 刘琪璟. 中国立木材积表. 北京: 中国林业出版社, 2017. | |
| Liu Q J . China's forest stock list. Beijing: China Forestry Publishing House, 2017. | |
| 刘琪璟, 沼田洋一, 金田真一. 航空激光雷达用于森林测量的数据处理方法研究. 遥感学报, 2008, 12 (1): 104- 110. | |
| Liu Q J , Yoichi N , Shinichi K . Processing of airborne laser scanned data for altimetry in forest areas. Journal of Remote Sensing, 2008, 12 (1): 104- 110. | |
| 孟宪宇. 测树学. 北京: 中国林业出版社, 1996. | |
| Meng X Y . Forest measurement. Beijing: China Forestry Publishing House, 1996. | |
| 欧强新, 雷相东, 沈琛琛, 等. 基于随机森林算法的落叶松-云冷杉混交林单木胸径生长预测. 北京林业大学学报, 2019, 41 (9): 9- 19. | |
| Ou Q X , Lei X D , Shen C C , et al. Growth prediction of single DBH of larch-fir mixed forest based on random forest algorithm. Journal of Beijing Forestry University, 2019, 41 (9): 9- 19. | |
| 庞勇, 黄克标, 李增元, 等. 基于遥感的湄公河次区域森林地上生物量分析. 资源科学, 2011, 33 (10): 1863- 1869. | |
| Pang Y , Huang K B , Li Z Y , et al. Forest aboveground biomass analysis using remote sensing in the greater Mekong subregion. Resources Science, 2011, 33 (10): 1863- 1869. | |
| 汤旭光. 2013. 基于激光雷达与多光谱遥感数据的森林地上生物量反演研究. 沈阳: 中国科学院研究生院博士学位论文. | |
| Tang X G. 2013. Estimation of forest aboveground biomass by integrating ICESat/GLAS waveform and TM data. Shenyang: PhD thesis of University of Chinese Academy of Sciences. [in Chinese] | |
| 王佳, 宋珊芸, 刘霞, 等. 结合影像光谱与地形因子的森林蓄积量估测模型. 农业机械学报, 2014, 45 (5): 216- 220. | |
| Wang J , Song S Y , Liu X , et al. Forest volume estimation model using spectra and topographic factors of ZY-3 image. Transactions of the Chinese Society of Agricultural Machinery, 2014, 45 (5): 216- 220. | |
| 王月婷, 张晓丽, 杨慧乔, 等. 基于Landsat8卫星光谱与纹理信息的森林蓄积量估算. 浙江农林大学学报, 2015, 32 (3): 384- 391. | |
| Wang Y T , Zhang X L , Yang H Q , et al. Forest volume estimation based on spectral and textural information from the Landsat8 satellite. Journal of Zhejiang A&F University, 2015, 32 (3): 384- 391. | |
| 吴迪, 范文义. 激光雷达协同多角度光学遥感数据反演树高. 北京林业大学学报, 2014, 36 (4): 8- 15. | |
| Wu D , Fan W Y . Forest canopy height estimation using LiDAR and optical multi-angler data. Journal of Beijing Forestry University, 2014, 36 (4): 8- 15. | |
| 徐济德. 我国第八次森林资源清查结果及分析. 林业经济, 2014, 36 (3): 6- 8. | |
| Xu J D . Results and analysis of the eighth inventory of forest resources in China. Forestry Economics, 2014, 36 (3): 6- 8. | |
| 闫飞. 2014. 森林资源调查技术与方法研究. 北京: 北京林业大学博士学位论文. | |
| Yan F. 2014. Research on techniques and methods of forest resources survey. Beijing: PhD thesis of Beijing Forestry University. [in Chinese] | |
| 杨柳, 冯仲科, 岳德鹏, 等. 结合纹理因子和地形因子的森林蓄积量多光谱估测模型. 光谱学与光谱分析, 2017, 37 (7): 2140- 2145. | |
| Yang L , Feng Z K , Yue D P , et al. Forest stock volume estimation model using textural and topographic factors of Landsat8 OLI. Spectroscopy and Spectral Analysis, 2017, 37 (7): 2140- 2145. | |
| 张瑞英, 庞勇, 李增元, 等. 结合机载LiDAR和LANDSAT ETM+数据的温带森林郁闭度估测. 植物生态学报, 2016, 40 (2): 14- 27. | |
| Zhang R Y , Pang Y , Li Z Y , et al. Estimation of canopy density of temperate forest using airborne LiDAR and LANDSAT ETM+ data. Chinese Journal of Plant Ecology, 2016, 40 (2): 14- 27. | |
| E·N·楚里克 , 孙 荣法 . 林分蓄积量的准确计算公式. 林业勘查设计, 1989, (4): 63- 67. | |
| E·N·Chulik , Sun R F . Accurate calculation formula of stand volume. Forest Investigation Design, 1989, (4): 63- 67. | |
|
Breiman L . Random forests. Machine Learning, 2001, 45 (1): 5- 32.
doi: 10.1023/A:1010933404324 |
|
|
Chen G , Hay G J , St-Onge B I T . A GEOBIA framework to estimate forest parameters from LiDAR transects, Quickbird imagery and machine learning: a case study in Quebec, Canada. International Journal of Applied Earth Observation and Geoinformation, 2012, 15, 28- 37.
doi: 10.1016/j.jag.2011.05.010 |
|
|
Chrysafis I , Mallinis G , Siachalou S , et al. Assessing the relationships between growing stock volume and Sentinel-2 imagery in a mediterranean forest ecosystem. Remote Sensing Letters, 2017, 8 (6): 508- 517.
doi: 10.1080/2150704X.2017.1295479 |
|
|
García-Gutiérrez J , Martínez-Álvarez F , Troncoso A , et al. A comparison of machine learning regression techniques for LiDAR-derived estimation of forest variables. Neurocomputing, 2015, 167, 24- 31.
doi: 10.1016/j.neucom.2014.09.091 |
|
|
Giree N , Stehman S V , Potapov P , et al. A sample-based forest monitoring strategy using Landsat, AVHRR and MODIS data to estimate gross forest cover loss in Malaysia between 1990 and 2005. Remote Sensing, 2013, 5 (4): 1842- 1855.
doi: 10.3390/rs5041842 |
|
|
Hollaus M , Wagner W , Maier B , et al. Airborne laser scanning of forest stem volume in a mountainous environment. Sensors, 2007, 7 (8): 1559- 1577.
doi: 10.3390/s7081559 |
|
|
Holmgren J . Prediction of tree height, basal area and stem volume in forest stands using airborne laser scanning. Scandinavian Journal of Forest Research, 2004, 19 (6): 543- 553.
doi: 10.1080/02827580410019472 |
|
|
Hu Y , Wu F , Sun Z , et al. The laser vegetation detecting sensor: a full waveform, large-footprint, airborne laser altimeter for monitoring forest resources. Sensors, 2019, 19 (7): 1699.
doi: 10.3390/s19071699 |
|
|
Hu Y , Xu X , Wu F , et al. Estimating forest stock volume in Hunan Province, China, by integrating in situ plot data, Sentinel-2 images, and linear and machine learning regression models. Remote Sensing, 2020, 12, 186.
doi: 10.3390/rs12010186 |
|
|
Lim K , Treitz P , Wulder M , et al. LiDAR remote sensing of forest structure. Progress in Physical Geography, 2003, 27 (1): 88- 106.
doi: 10.1191/0309133303pp360ra |
|
|
Næsset E , Bjerknes K . Estimating tree heights and number of stems in young forest stands using airborne laser scanner data. Remote Sensing of Environment, 2001, 78 (3): 328- 340.
doi: 10.1016/S0034-4257(01)00228-0 |
|
| Næsset E , Gobakken T . Estimating forest growth using canopy metrics derived from airborne laser scanner data. Remote Sensing of Environment, 2005, 96 (3/4): 453- 465. | |
|
Næsset E , Økland T . Estimating tree height and tree crown properties using airborne scanning laser in a boreal nature reserve. Remote Sensing of Environment, 2002, 79 (1): 105- 115.
doi: 10.1016/S0034-4257(01)00243-7 |
|
|
Næsset E . Estimating timber volume of forest stands using airborne laser scanner data. Remote Sensing of Environment, 1997, 61 (2): 246- 253.
doi: 10.1016/S0034-4257(97)00041-2 |
|
|
Næsset E . Predicting forest stand characteristics with airborne scanning laser using a practical two-stage procedure and field data. Remote Sensing of Environment, 2002, 80 (1): 88- 99.
doi: 10.1016/S0034-4257(01)00290-5 |
|
|
Nilsson M . Estimation of tree heights and stand volume using an airborne LiDAR system. Remote Sensing of Environment, 1996, 56 (1): 1- 7.
doi: 10.1016/0034-4257(95)00224-3 |
|
|
Shao Z , Zhang L , Wang L . Stacked sparse autoencoder modeling using the synergy of airborne LiDAR and satellite optical and SAR data to map forest above-ground biomass. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2017, 10 (12): 5569- 5582.
doi: 10.1109/JSTARS.2017.2748341 |
|
|
Sheridan R , Popescu S , Gatziolis D , et al. Modeling forest aboveground biomass and volume using airborne LiDAR metrics and forest inventory and analysis data in the Pacific northwest. Remote Sensing, 2014, 7 (1): 229- 255.
doi: 10.3390/rs70100229 |
|
| Takma C , Atil H , Aksakal V . Comparison of multiple linear regression and artificial neural network models goodness of fit to lactation milk yields. Kafkas Vniversitesi Veteriner Fakültesi Dergisi, 2012, 18 (6): 941- 944. | |
|
Yu X , Hyyppä J , Kaartinen H , et al. Obtaining plotwise mean height and volume growth in boreal forests using multi-temporal laser surveys and various change detection techniques. International Journal of Remote Sensing, 2008, 29 (5): 1367- 1386.
doi: 10.1080/01431160701736356 |
|
|
Yu X , Hyyppä J , Vastaranta M , et al. Predicting individual tree attributes from airborne laser point clouds based on the random forests technique. ISPRS Journal of Photogrammetry and Remote Sensing, 2011, 66 (1): 28- 37.
doi: 10.1016/j.isprsjprs.2010.08.003 |
| [1] | Qiu Shuai, Shen Baichun, Li Tingting, Guo Juan, Wang Ji, Sun Lina, Chen Xuping, Hu Shaoqing. A Method of Osmanthus fragrans Cultivars Identification Based on Random Forest Algorithm and SRAP Molecular Markers [J]. Scientia Silvae Sinicae, 2018, 54(1): 32-45. |
| [2] | Liang Huiling, Lin Yurui, Yang Guang, Su Zhangwen, Wang Wenhui, Guo Futao. Application of Random Forest Algorithm on the Forest Fire Prediction in Tahe Area Based on Meteorological Factors [J]. Scientia Silvae Sinicae, 2016, 52(1): 89-98. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||