
Scientia Silvae Sinicae ›› 2021, Vol. 57 ›› Issue (2): 179-192.doi: 10.11707/j.1001-7488.20210218
• Scientific notes • Previous Articles
Yinghao Yang1,2,Jinhao Liu1,2,*,Yili Zheng1,Qingqing Huang1,2
Received:2020-06-28
Online:2021-02-25
Published:2021-03-29
Contact:
Jinhao Liu
CLC Number:
Yinghao Yang,Jinhao Liu,Yili Zheng,Qingqing Huang. Obstacle Avoidance Path Planning of Manipulator of Forestry Felling & Cultivation Machine[J]. Scientia Silvae Sinicae, 2021, 57(2): 179-192.
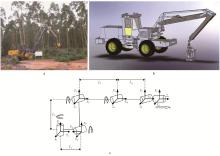
Fig.1
Working principle and schematic diagram of forestry felling & cultivation machine"

Table 1
Manipulator model parameters"
| 关节Jointi | αi-1/rad | αi-1/dm | di/dm | θi/rad | 工作范围Workspace/(°·dm-1) |
| 1 | 0 | 0 | 0 | θ(1) | (-90~90) |
| 2 | pi/2 | L1=5.8 | 0 | θ2 | (-60~90) |
| 3 | 0 | L2=13.2 | 0 | θ3 | (-90~90) |
| 4 | 0 | L3=45 | 0 | θ4 | (-120~0) |
| 5 | 0 | L4=33 | 0 | pi/2 | (90) |
| 6 | pi/2 | 0 | d=20 | 0 | (1.41~20) |

Fig.2
Schematic diagram of improved RRT algorithm"
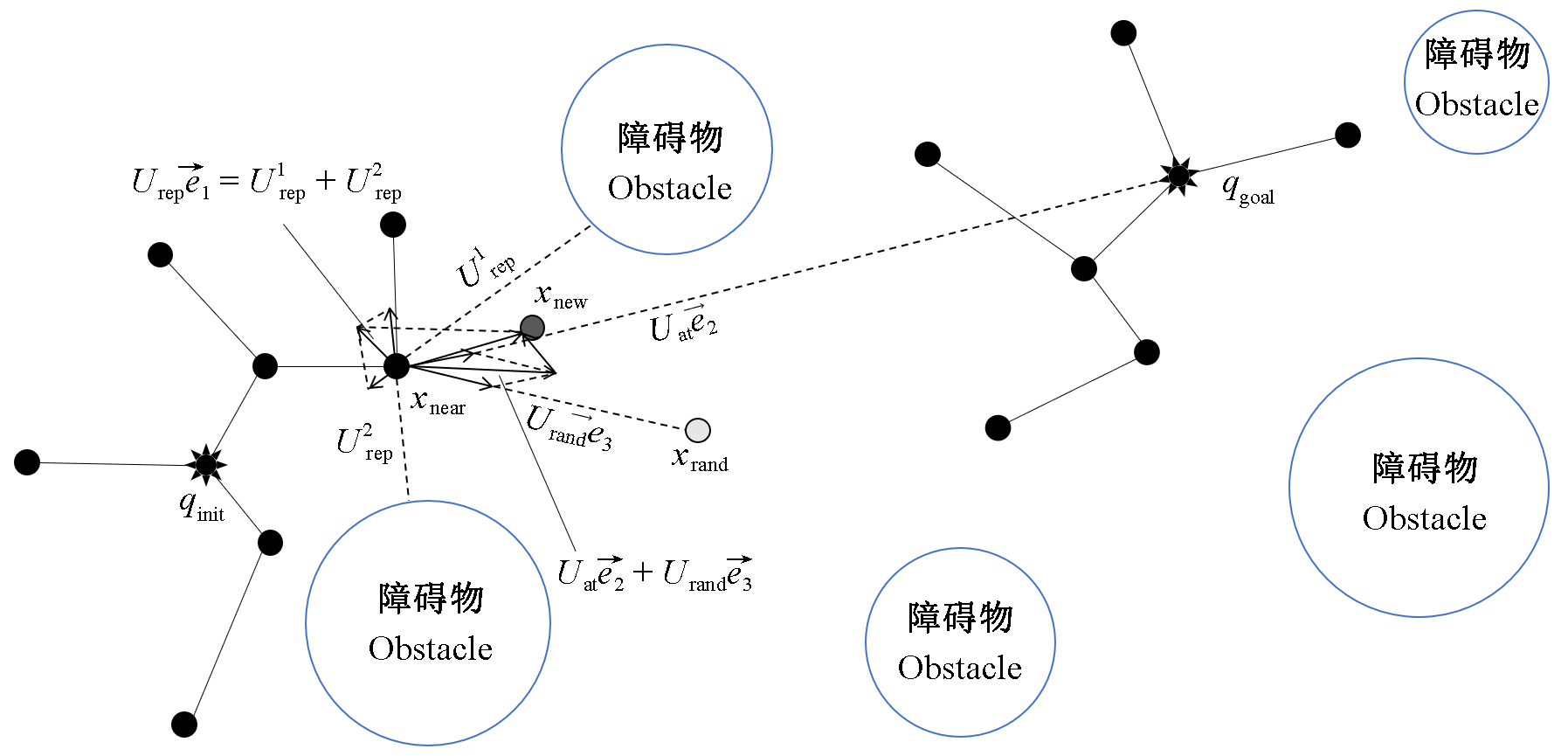
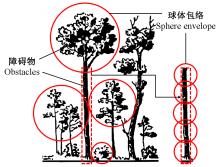
Fig.3
Model of obstacles spherical envelope"

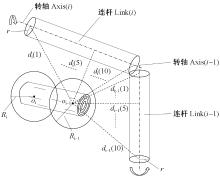
Fig.4
Bounding box geometry"
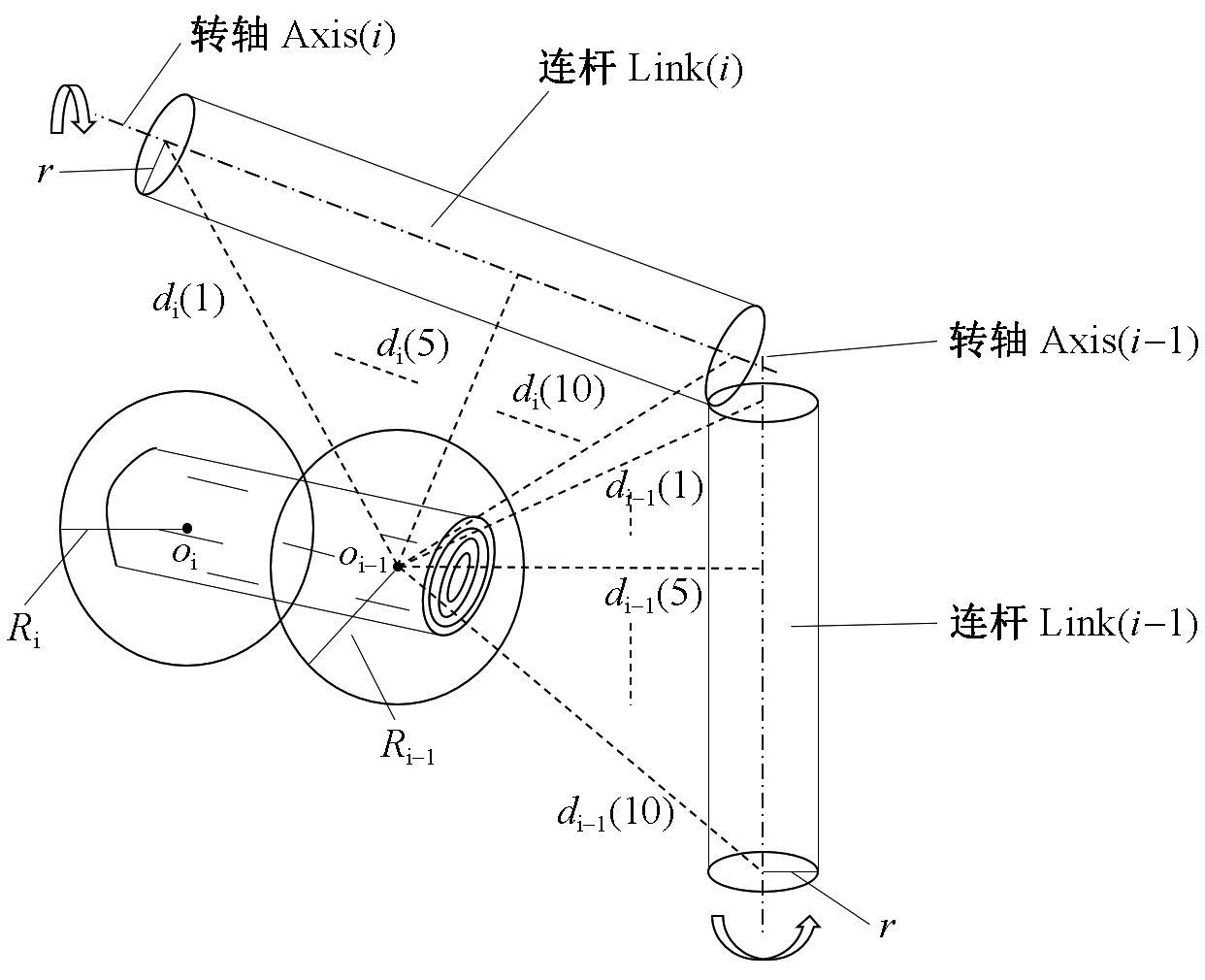

Fig.5
Schematic diagram of algorithm flow"
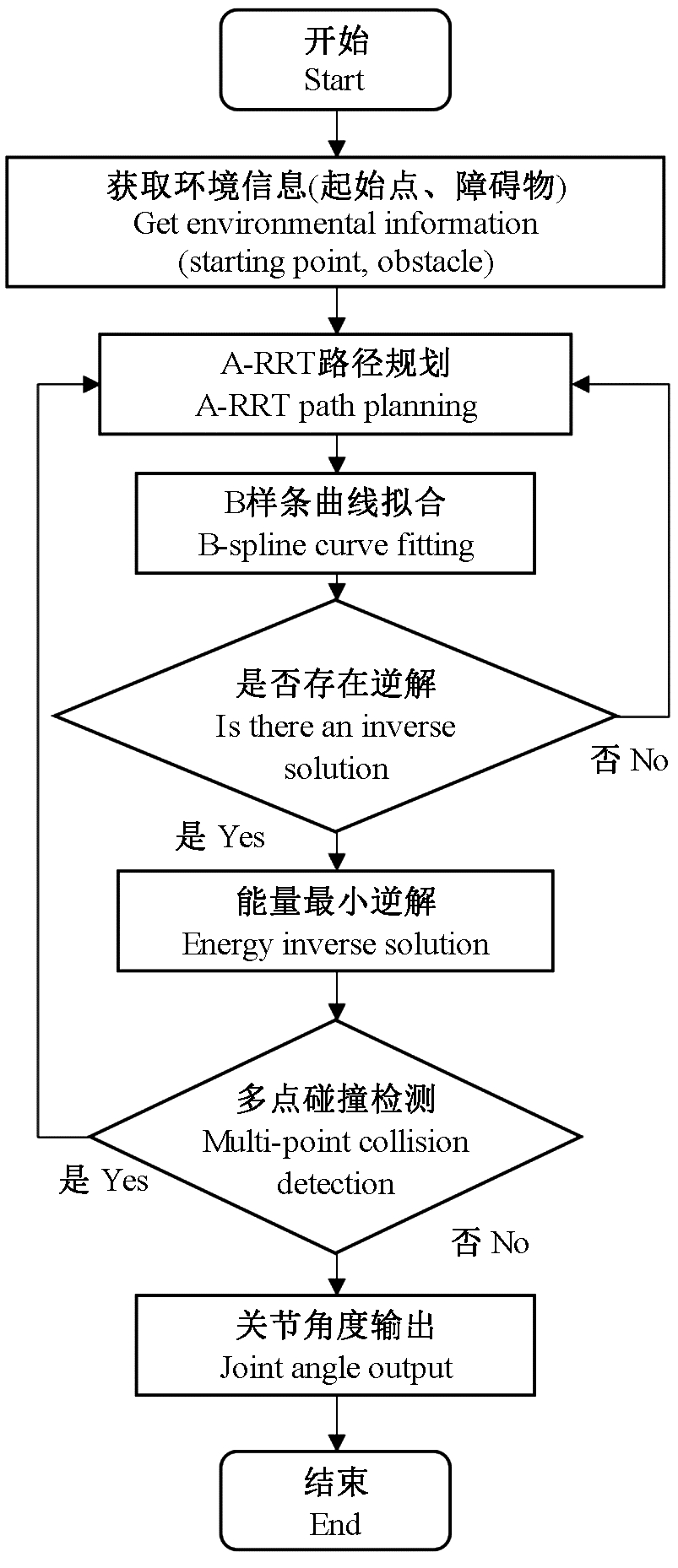
Table 2
Experimental parameters of the manipulator"
| 参数名称Parameter name | 相关取值Related values |
| 初始点Initial | (65,35,45),(8,8,8) |
| 目标点Target | (-79,43,-15),(92,92,92) |
| 初始角度Initial angle /(rad·dm-1) | [0.493 9 0.584 4 0.423 4 -1.018 1 1.570 8 1.410 0] |
| 扩展步长Expansion step /dm | 2 |
| 引力增量(ks) Gravity increment | 2 |
| 斥力增量(kp) Repulsion increment | 10 |
| 限制增量(kx) Limit increment | 0.9 |
| 偏执概率(k) Paranoid probability | 0.5 |

Fig.6
Simulation of the manipulator in different obstacle environments"

Fig.7
Curve of joint angle change of manipulator"
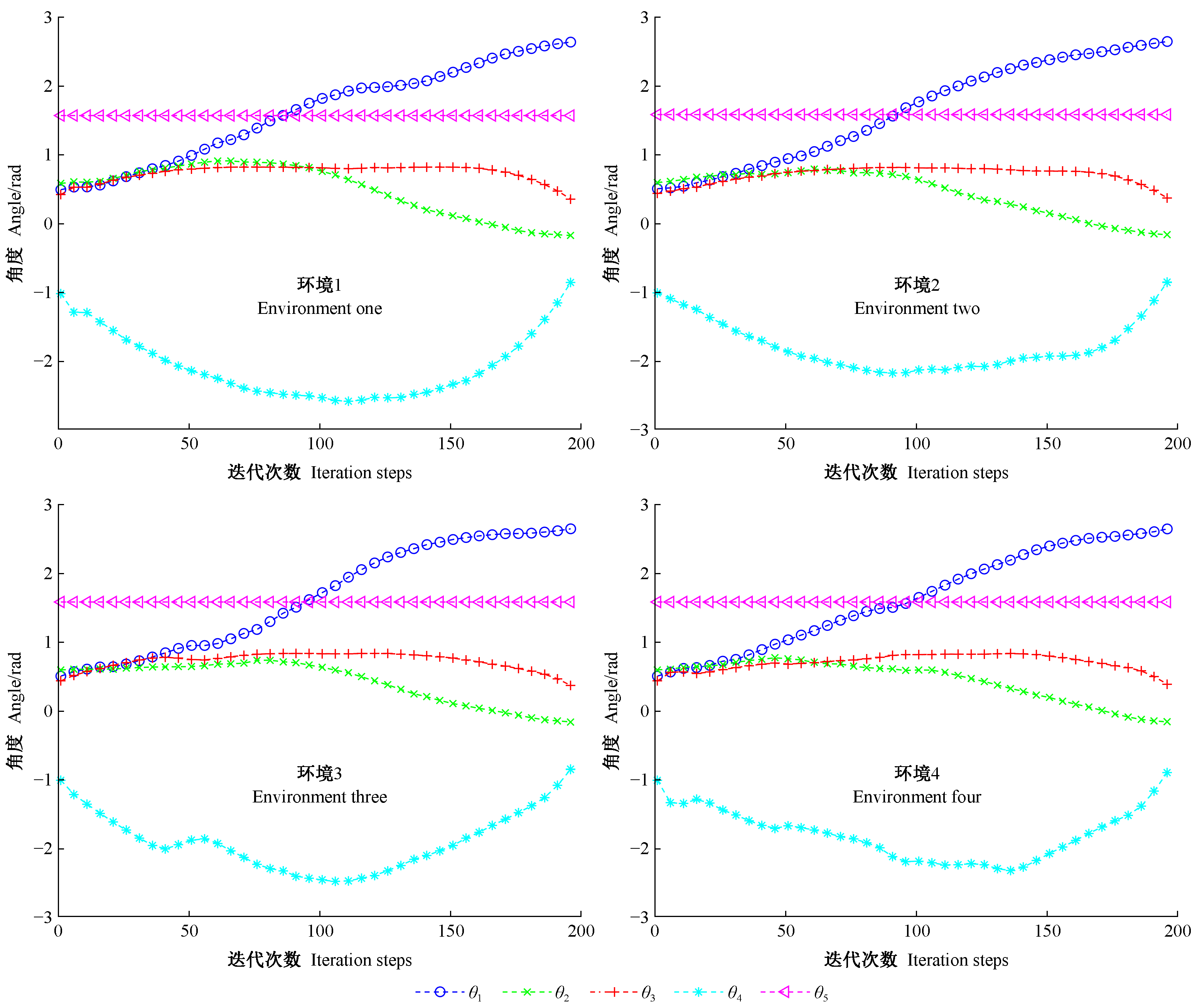

Fig.8
Four different obstacle maps"


Fig.9
Simulation results in two obstacle environments"

Table 3
Comparison of algorithm time and iteration steps"
| 算法 | Algorithm | 地图1 Map one | 地图2 Map two | 地图3 Map three | 地图4 Map four | 平均 Avg. | |||||||||||
| 最小 Min. | 最大 Max. | 平均 Avg. | 最小 Min. | 最大 Max. | 平均 Avg. | 最小 Min. | 最大 Max. | 平均 Avg. | 最小 Min. | 最大 Max. | 平均 Avg. | ||||||
| RRT | 时间Time/s | 4.85 | 17.59 | 9.29 | 5.67 | 15.92 | 9.31 | 3.09 | 16.37 | 9.40 | 4.22 | 31.90 | 14.92 | 10.73 | |||
| 次数Steps/s | 773 | 2 084 | 1 239 | 854 | 1 931 | 1 238 | 506 | 1 909 | 1 208 | 661 | 2 828 | 1 655 | 1 335 | ||||
| LRRT | 时间Time/s | 0.59 | 1.76 | 1.22 | 0.52 | 0.91 | 0.71 | 0.44 | 1.48 | 0.83 | 0.27 | 1.77 | 0.95 | 0.93 | |||
| 次数Steps/s | 48 | 82 | 70 | 56 | 67 | 69 | 58 | 91 | 82 | 40 | 189 | 111 | 83 | ||||
| HRRT | 时间Time/s | 0.47 | 0.98 | 0.63 | 0.36 | 1.22 | 0.79 | 0.36 | 1.55 | 1.07 | 0.26 | 4.13 | 1.59 | 1.02 | |||
| 次数Steps/s | 45 | 63 | 56 | 47 | 97 | 65 | 49 | 88 | 79 | 37 | 227 | 108 | 77 | ||||
| biRRT | 时间Time/s | 0.52 | 1.11 | 0.87 | 0.51 | 1.09 | 0.72 | 0.31 | 1.16 | 0.66 | 0.41 | 0.99 | 0.70 | 0.74 | |||
| 次数Steps/s | 94 | 183 | 143 | 86 | 108 | 113 | 55 | 187 | 108 | 74 | 165 | 114 | 119 | ||||
| A-RRT | 时间Time/s | 0.31 | 0.64 | 0.49 | 0.21 | 0.50 | 0.36 | 0.16 | 0.69 | 0.43 | 0.32 | 0.71 | 0.47 | 0.44 | |||
| 次数Steps | 56 | 95 | 75 | 42 | 62 | 56 | 29 | 70 | 56 | 38 | 44 | 48 | 59 | ||||

Fig.10
Comparison of algorithm time and iteration steps"
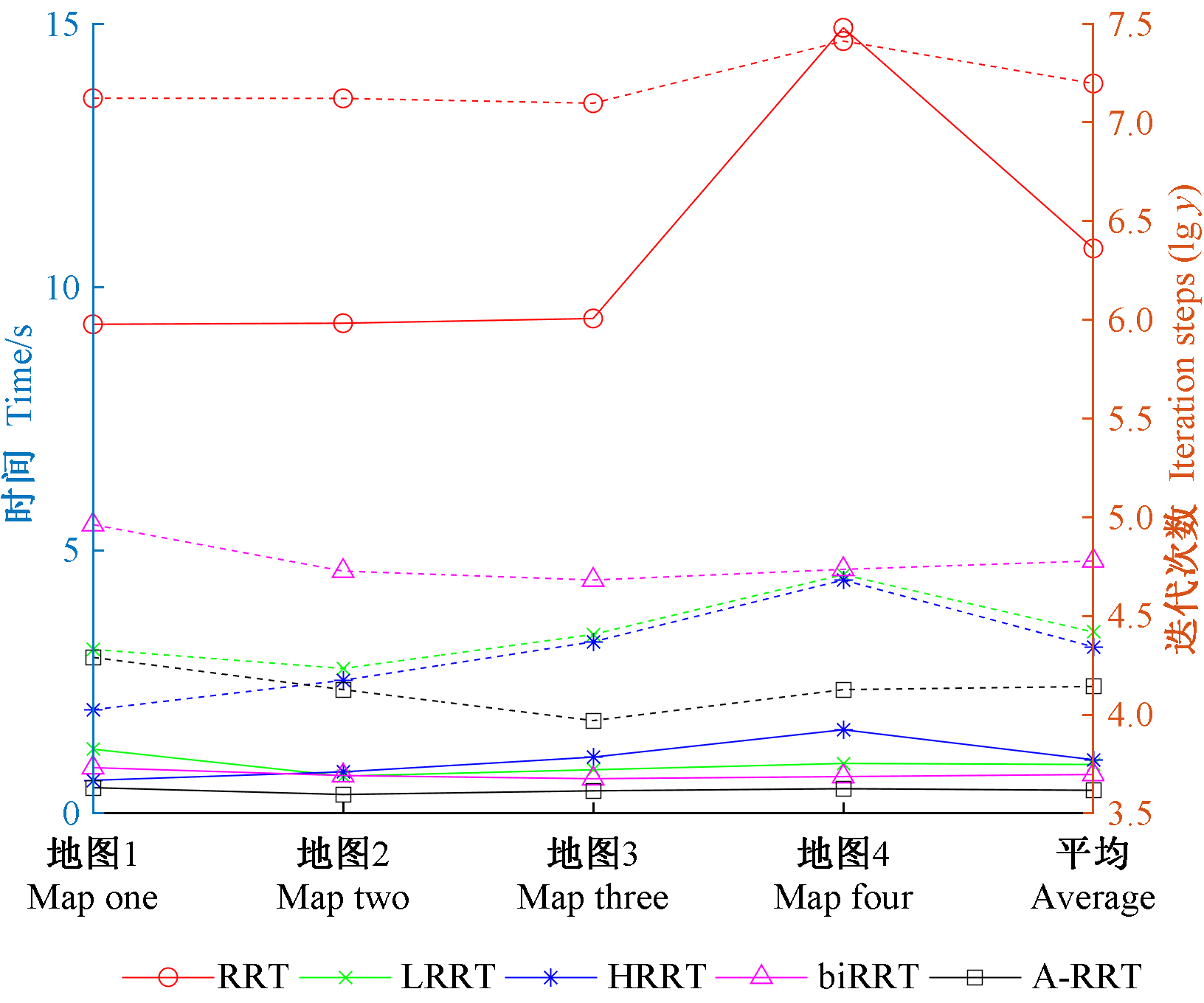
Fig.11
Matlab simulation and joint angle changesa"


Fig.12
The movement of the machine in MoveIte"

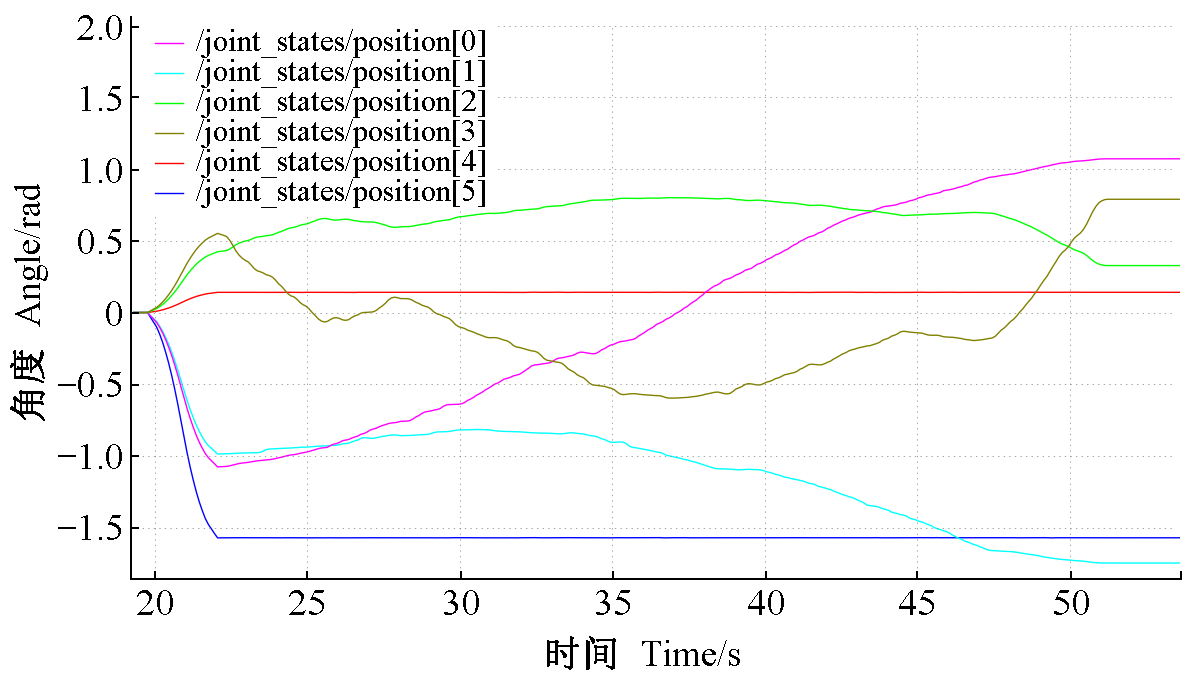
Fig.13
The angle change of the manipulator movement in MoveIt"
|
鲍际平, 刘晋浩, 魏占国, 等. CFJ30轮式采伐联合机底盘传动方案的研究. 湖北农业科学, 2009, 48 (10): 2573- 2575, 2580.
doi: 10.3969/j.issn.0439-8114.2009.10.077 |
|
|
Bao J P , Liu J H , Wei Z G , et al. Study on the transmission scheme of CFJ30 wheeled log harvester chassis. Hubei Agricultural Sciences, 2009, 48 (10): 2573- 2575, 2580.
doi: 10.3969/j.issn.0439-8114.2009.10.077 |
|
| 陈满意, 张桥, 张弓, 等. 多障碍环境下机械臂避障路径规划的研究. 计算机集成制造系统, 2019, | |
| Chen M Y , Zhang Q , Zhang G , et al. Research on obstacle avoidance path planning of manipulator in multiple obstacles environment. Computer Integrated Manufacturing Systems, 2019, | |
| 耿志斌, 姜树海, 崔嵩鹤. 林木采伐及木材精深加工机器人研究进展. 世界林业研究, 2020, 33 (5): 53- 58. | |
| Geng Z B , Jiang S H , Cui S H . Research on robot for forest harvesting and wood deep processing. World Forestry Research, 2020, 33 (5): 53- 58. | |
|
姬伟, 程风仪, 赵德安, 等. 基于改进人工势场的苹果采摘机器人机械手避障方法. 农业机械学报, 2013, 44 (11): 253- 259.
doi: 10.6041/j.issn.1000-1298.2013.11.043 |
|
|
Ji W , Cheng F Y , Zhao D A , et al. Obstacle avoidance method of apple harvesting robot manipulator. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44 (11): 253- 259.
doi: 10.6041/j.issn.1000-1298.2013.11.043 |
|
| 廖旭恩. 如何开展林业机械采伐有效提高作业效率. 林业勘查设计, 2019, (1): 102- 103. | |
| Liao X E . How to carry out forestry machinery harvesting to effectively improve work efficiency. Forest Investigation Design, 2019, (1): 102- 103. | |
| 刘成菊, 韩俊强, 安康. 基于改进RRT算法的RoboCup机器人动态路径规划. 机器人, 2017, 39 (1): 8- 15. | |
| Liu C J , Han J Q , An K . Dynamic path planning based on an improved RRT algorithm for RoboCup robot. Robot, 2017, 39 (1): 8- 15. | |
| 刘延鹤, 傅万四, 张彬, 等. 林业机器人发展现状与未来趋势. 世界林业研究, 2020, 33 (1): 38- 43. | |
| Liu Y H , Fu W S , Zhang B , et al. Development status and future trends of forestry robots. World Forestry Research, 2020, 33 (1): 38- 43. | |
| 彭光宇, 董洪波, 马斌. 两种DH模型的机器人运动学建模对比研究. 机械研究与应用, 2019, 32 (6): 62- 65. | |
| Peng G Y , Dong H B , Ma B . Comparative study of robot kinematics modeling based on two DH models. Mechanical Research & Application, 2019, 32 (6): 62- 65. | |
| 彭云龙, 张伟, 张艳, 等. 我国森林抚育现状分析及对策研究. 河北农机, 2018, (7): 49. | |
| Peng Y L , Zhang W , Zhang Y , et al. Analysis of current situation of forest tending in my country and countermeasures. Hebei Agricultural Machinery, 2018, (7): 49. | |
|
戚春华, 朱守林, 王效亮, 等. 森林采运作业环境成本分析. 森林工程, 2003, (6): 3- 5.
doi: 10.3969/j.issn.1001-005X.2003.06.002 |
|
|
Qi C H , Zhu S L , Wang X L , et al. Environmental costs of forest operations. Forest Engineering, 2003, (6): 3- 5.
doi: 10.3969/j.issn.1001-005X.2003.06.002 |
|
| 汪首坤, 邸智, 王军政, 等. 基于A*改进算法的机械臂避障路径规划. 北京理工大学学报, 2011, 31 (11): 1302- 1306. | |
| Wang S K , Di Z , Wang J Z , et al. Path planning method for manipulator to avoid obstacle based on advanced A* algorithm. Transactions of Beijing Institute of Technology, 2011, 31 (11): 1302- 1306. | |
| 熊有伦. 机器人技术基础. 武汉: 华中科技大学出版社, 1996. | |
| Xiong Y L . Fundamentals of robot techniques. Wuhan: Huazhong University of Science and Technology Press, 1996. | |
| 徐海燕, 姜树海. 森林作业机器人研究动态. 世界林业研究, 2017, 30 (2): 51- 55. | |
| Xu H Y , Jiang S H . Research trend of forest operating robots. World Forestry Research, 2017, 30 (2): 51- 55. | |
| 许晓东, 莫晓勇, 邓海燕, 等. 桉树人工林抚育间伐优化模型. 福建农林大学学报: 自然科学版, 2020, 49 (3): 341- 347. | |
| Xu X D , Mo X Y , Deng H Y , et al. Optimizing models of tending and thinning for Eucalyptus plantation. Journal of Fujian Agriculture and Forestry University: Natural Science Edition, 2020, 49 (3): 341- 347. | |
| 尹斌. 冗余机械臂运动学及避障路径规划研究. 哈尔滨: 哈尔滨工业大学硕士学位论文, 2014, | |
| Yin B . Research on kinematics and obstacle avoidance path planning for redundant manipulator. Harbin: MS thesis of Harbin Institute of Technology, 2014, | |
| 由弘扬, 贺帅, 刘宏伟, 等. 基于bi_RRT算法的九自由度机械臂路径规划. 计算机仿真, 2019, 36 (7): 308- 313. | |
| You H Y , He S , Liu H W , et al. The mechanical arm of 9-dof path planning based on bi_RRT algorithm. Computer Simulation, 2019, 36 (7): 308- 313. | |
| 余卓平, 李奕姗, 熊璐. 无人车运动规划算法综述. 同济大学学报: 自然科学版, 2017, (8): 1150- 1159. | |
| Yu Z P , Li Y S , Xiong L . A review of the motion planning problem of autonomous vehicle. Journal of Tongji University: Natural Science, 2017, (8): 1150- 1159. | |
| 赵玉刚, 李伟, 郭峰, 等. 基于Cox-de Boor递推的任意次NURBS曲线插补算法的研究与仿真. 组合机床与自动化加工技术, 2012, (6): 45- 48. | |
| Zhao Y G , Li W , Guo F , et al. The random degree NURBS curve interpolation and simulation based on Cox-de Boor algorithm. Modular Machine Tool & Automatic Manufacturing Technique, 2012, (6): 45- 48. | |
| 周国相, 吴立东, 王玉林. 对森林抚育采伐的目的及效果的分析. 林业勘查设计, 2004, (1): 12- 13. | |
| Zhou G X , Wu L D , Wang Y L . Analysis on the purpose and effect of forest tending and harvesting. Forest Investigation Design, 2004, (1): 12- 13. | |
| 周玉申. 先进的林业技术装备是现代林业建设的支撑和保证. 木材加工机械, 2011, 22 (4): 27- 29, 39. | |
| Zhou Y S . The advanced forestry technical equipment is the support and guarantee of modern forestry construction. Forestry and Grassland Machinery, 2011, 22 (4): 27- 29, 39. | |
| 朱宏辉, 明瑞冬, 朱轶. 基于改进RRT*算法的路径规划. 武汉理工大学学报, 2017, 39 (2): 72- 76. | |
| Zhu H W , Ming R D , Zhu Y . Path planning based on improved RRT* algorithm. Journal of Wuhan University of Technology, 2017, 39 (2): 72- 76. | |
| 祝敬, 杨马英. 基于改进人工势场法的机械臂避障路径规划. 计算机测量与控制, 2018, 26 (10): 205- 210. | |
| Zhu J , Yang M Y . Path planning of manipulator to avoid obstacle based on improved artificial potential field method. Computer Measurement & Control, 2018, 26 (10): 205- 210. | |
| Brockerhoff E G , Jactel H , Parrotta J A , et al. Plantation forests and biodiversity: oxymoron or opportunity?. Biodiversity and Conservation, 2008, 17 (5): 925- 951. | |
| Chan T F , Dubey R V . A weighted least-norm solution based scheme for avoiding joint limits for redundant joint manipulators. Transactions on Robotics and Automation, IEEE, 1995, 11 (2): 286- 292. | |
| Dong X , Mendoza-Trejo O , Morales D O , et al. Simulation-based comparison between two crane-bunk systems for loading work when considering energy-optimal motion planning. International Journal of Forest Engineering, 2019, 31 (1): 70- 77. | |
| Dubey R V , Euler J A , Babcock S M . Real-time implementation of an optimization scheme for seven-degree-of-freedom redundant manipulators. Transactions on Robotics and Automation, IEEE, 1991, 7 (5): 579- 588. | |
| Hartenberg R S , Denavit J . A kinematic notation for lower pair mechanisms based on matrices. Journal of Applied Mechanics, 1955, 77 (2): 215- 221. | |
| Hera P L , Morales D O . What do we observe when we equip a forestry crane with motion sensors?. Croatian Journal of Forest Engineering, 2019, 40 (2): 259- 280. | |
| Kim D H , Lim S J , Lee D . A RRT-based motion planning of dual-arm robot for(Dis) assembly tasks. International Symposium on Robotics, IEEE, 2014, 1- 6. | |
| LaValle S M . Rapidly-exploring random trees: a new tool for path planning. Algorithmic & Comutational Robotics New Directions, 1998, 1 (1): 293- 308. | |
| Mohamed H A F , Yahya S , Moghavvemi M , et al. A new inverse kinematics method for three dimensional redundant manipulator. The International Conference on Control, Automation, and Systems, IEEE, 2009, 1557- 1562. | |
| Morales D O , La Hera P , Westerberg S , et al. Path-constrained motion analysis: an algorithm to understand human performance on hydraulic manipulators. Transactions on Human-Machine Systems, IEEE, 2014, 45 (2): 187- 199. | |
| Morales D O , Westerberg S , Hera P X L , et al. Increasing the level of automation in the forestry logging process with crane trajectory planning and control. Journal of Field Robotics, 2014, 31 (3): 343- 363. | |
| Oyama E , Agah A , MacDorman K F , et al. A modular neural network architecture for inverse kinematics model learning. Neurocomputing, 2001, 38, 797- 805. | |
| Ratcliffe S , Holzwarth F , Nadrowski K , et al. Tree neighbourhood matters-tree species composition drives diversity-productivity patterns in a near-natural beech forest. Forest Ecology and Management, 2015, 335, 225- 234. | |
| Sheng L , Yiqing W , Qingwei C , et al. A new geometrical method for the inverse kinematics of the hyper-redundant manipulators. International Conference on Robotics and Biomimetics, IEEE, 2006, 1356- 1359. | |
| Urmson C , Simmons R . Approaches for heuristically biasing RRT growth. International Conference on Intelligent Robots and Systems, IEEE, 2003, 1178- 1183. | |
| Weghe M V , Ferguson D , Srinivasa S S . Randomized path planning for redundant manipulators without inverse kinematics. International Conference on Humanoid Robots, IEEE, 2007, 477- 482. | |
| Xia Y , Wang J . A dual neural network for kinematic control of redundant robot manipulators. Transactions on Systems, Man, and Cybernetics, Part B(Cybernetics), IEEE, 2001, 31 (1): 147- 154. |
| [1] | Liu Jinhao;Lu Huaimin. MANUFACTURE AND STUDY OF THE ROBOT OF EXCAVATING TREE STUMP [J]. Scientia Silvae Sinicae, 2003, 39(4): 113-117. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||